We use cookies and other tracking technologies to improve your browsing experience on our website, to show you personalized content and targeted ads, to analyze our website traffic, and to understand where our visitors are coming from.
⚠️
GDPR & Cookie Policy Notice
In accordance with data protection regulations; the use of mandatory cookies is required for the core functions of our website to operate, ensure data security, and perform analytics. If you reject the use of cookies, it is not possible to benefit from the services on our website due to technical limitations and data synchronization interruptions. You must consent to the use of cookies to access the content on our site.
Engineering Architecture of Autonomous Systems: SLAM, Sensor Fusion, and Reinforcement Learning Processes
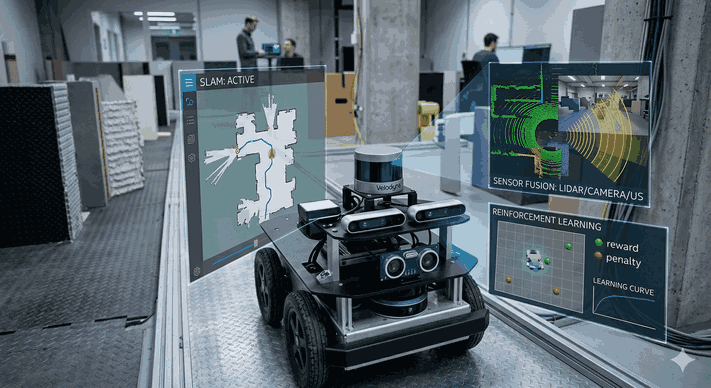
Autonomous systems are more than just mechanical structures; they represent the seamless integration of complex algorithms and high-density data processing with the physical world. Modern robotic architectures provide independent movement capabilities in dynamic environments by combining perception, mapping, and decision-making processes. In this article, we will examine the core pillars of autonomous systems—SLAM, Sensor Fusion, and Reinforcement Learning (RL)—from a deep technical perspective.
Figure 1: Engineering Architecture of Autonomous Systems: SLAM, Sensor Fusion, and Reinforcement Learning Processes.
1. SLAM (Simultaneous Localization and Mapping)
The biggest challenge a robot faces when dropped into an unknown environment is answering the questions “Where am I?” and “What is around me?” at the same time. SLAM is the process where a robot estimates its own location (pose) within a map while simultaneously creating a map of the environment using sensor data.
Mathematical Background and EKF-SLAM
Bayesian filtering methods are typically used in SLAM processes. The Extended Kalman Filter (EKF) performs state estimation by linearizing non-linear system models.
Here, $x_k$ represents the robot’s position, $u_k$ the control input, and $z_k$ the sensor measurement.
Simple Odometry Integration with C++
Modern SLAM applications (such as gmapping or ORB-SLAM) generally use ROS (Robot Operating System) libraries. Below is an example of a basic structure that processes a robot’s movement data:
Technical Note: “Loop Closure” is of critical importance in SLAM applications. When a robot recognizes a point it has previously visited, it optimizes the map by resetting the accumulated error (drift).
2. Sensor Fusion: Data Merging and High Accuracy
A single sensor (only camera or only Lidar) is affected by environmental factors (light, rain, distance limits). Sensor fusion creates a single “environmental model” by mathematically combining data from different modalities.
Lidar and Camera Fusion
Lidar provides a 3D point cloud of the environment with high precision, while the camera provides object detection and color information. Calibration of these two data types is performed via extrinsic matrices.
Unscented Kalman Filter (UKF): In cases where the standard Kalman filter is insufficient for complex maneuvers, it produces more stable results by using Sigma points that better represent the probability distribution.
Simple Data Fusion Logic via Python
The filterpy library, used especially in autonomous driving projects, is effective for the simulation of these processes.
import numpy as np
from filterpy.kalman import KalmanFilter
definitialize_fusion_filter():
f = KalmanFilter(dim_x=2, dim_z=1)
f.x = np.array([[0.], [0.]]) # Initial state (position and velocity) f.F = np.array([[1., 1.], [0., 1.]]) # State transition matrix f.H = np.array([[1., 0.]]) # Measurement matrix f.P *=1000.# Covariance (uncertainty) f.R =5# Measurement noise f.Q =0.1# Process noisereturn f
# Update with distance data from Lidarfilter = initialize_fusion_filter()
filter.predict()
filter.update(10.5) # Measured value
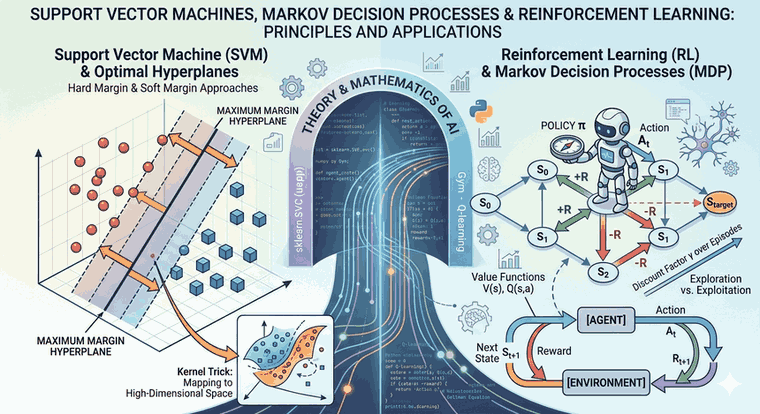
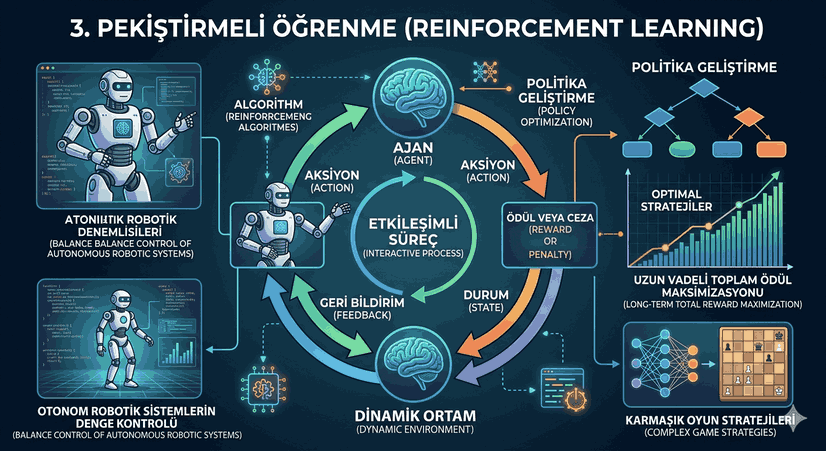
3. Reinforcement Learning (RL)
This is the process where robots find the “best strategy” by interacting with the environment instead of following rigid, pre-programmed rules. A robot performs an Action, receives a Reward or punishment in return, and observes the next State.
Markov Decision Process (MDP) and Q-Learning
In autonomous systems, RL is usually modeled as a Markov Decision Process. The main goal is to find the optimal policy ($\pi$) that will maximize the total expected reward.
$$Q(s, a) = Q(s, a) + \alpha [r + \gamma \max Q(s', a') - Q(s, a)]$$
Deep Q-Networks (DQN): If the robot’s state is very complex (e.g., high-resolution image), deep neural networks are used to estimate Q-values.
Software Resources and Libraries
Libraries that have become the industry standard in RL projects are:
OpenAI Gym/Gymnasium: Standard interface for robotic simulations.
Note: The grasping capabilities of robotic arms are usually trained with PPO (Proximal Policy Optimization) algorithms. These algorithms ensure a stable learning process by preventing the policy from changing with too large steps during training.
4. System Integration: ROS 2 and Robotic Software Architecture
All these technical components combine on ROS 2 (Robot Operating System), which functions like an operating system but is actually a communication layer. ROS 2 provides asynchronous data flow between nodes.
Critical Software Components:
FastDDS: The communication protocol underlying ROS 2 that enables real-time and secure transmission of data.
MoveIt: The main library used for the planning and manipulation of robotic arms.
Nav2 (Navigation 2): The stack that enables mobile robots to avoid obstacles and determine their route using SLAM data.
5. Advanced Technical Details and Application Notes
Lidar Data Processing (Point Cloud Library - PCL)
A robot needs to filter point clouds to make sense of its environment. The Voxel Grid filter reduces data density while preserving structural information.
When an autonomous vehicle is traveling at 100 km/h, a 100 ms delay in the sensor fusion algorithm means the vehicle will travel approximately 2.8 meters. Therefore, critical algorithms should generally be written in C++ rather than Python and run on RTOS (Real-Time Operating System) kernels.
In conclusion;
Autonomous systems are a synthesis of mathematical modeling, low-level hardware control, and high-level artificial intelligence approaches. A robot that makes sense of the world with SLAM, clears noise with Sensor Fusion, and develops strategies with Reinforcement Learning represents the cutting edge of modern engineering. The efficient operation of these technologies is directly dependent on the accuracy of the chosen software libraries (ROS 2, PCL, PyTorch) and algorithmic optimizations.