We use cookies and other tracking technologies to improve your browsing experience on our website, to show you personalized content and targeted ads, to analyze our website traffic, and to understand where our visitors are coming from.
⚠️
GDPR & Cookie Policy Notice
In accordance with data protection regulations; the use of mandatory cookies is required for the core functions of our website to operate, ensure data security, and perform analytics. If you reject the use of cookies, it is not possible to benefit from the services on our website due to technical limitations and data synchronization interruptions. You must consent to the use of cookies to access the content on our site.
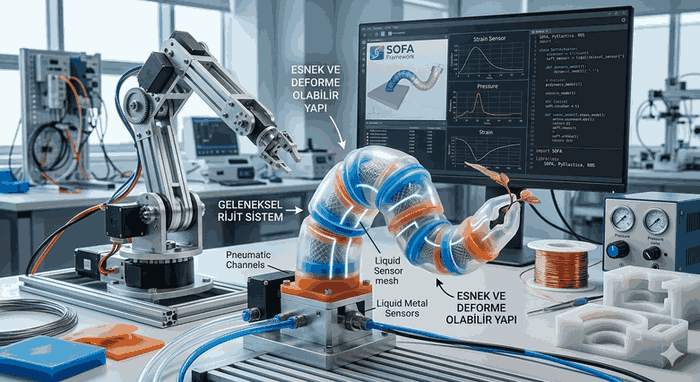
Engineering Fundamentals and Mechanical Analysis of Flexible Structures in Soft Robotic Systems
Traditional robotic systems have been built upon rigid linkage elements and metallic bodies that have offered high precision and speed for decades. However, when examining the mechanical advantages of living systems in nature, it is observed that rigid tissues combine with flexible and deformable structures to adapt to complex environments. Soft Robotics represents the transition from rigid bodies to elastomeric and smart material-based structures by integrating this biomimetic approach into the engineering discipline.
Figure 1: Engineering Fundamentals and Mechanical Analysis of Flexible Structures in Soft Robotic Systems.
1. Kinematic and Dynamic Foundations of Soft Robotics
While the degree of freedom ($DOF$) in rigid robots is limited by the number of joints, every point on the body of soft robots theoretically has an infinite degree of freedom ($infinite-DOF$). This situation makes it necessary to go beyond classical Denavit-Hartenberg parameters.
Constant Curvature Kinematics
Piecewise Constant Curvature (PCC) models are generally used to model the motion of a soft arm. In this model, the arm is divided into arc segments defined by arc length ($s$), curvature ($\kappa$), and orientation angle ($\phi$).
In mechanical analysis, the hyperelastic behavior of the material is simulated using Neo-Hookean or Mooney-Rivlin models. The strain energy density function ($W$) determines the material’s response under large deformations:
$$W = C_1(I_1 - 3) + C_2(I_2 - 3)$$
Here, $I_1$ and $I_2$ are the invariants of the Cauchy-Green deformation tensor.
2. Actuation Mechanisms and Smart Materials
Unlike traditional DC motors, the “muscle” systems of soft robots consist of smart materials that react to environmental stimuli.
Pneumatic and Hydraulic Actuators (PneuNets): Based on the principle of inflating elastomeric channels with pressurized air. The increase in pressure creates bending, elongation, or torsion depending on the channel’s geometry.
Shape Memory Alloys (SMA): Metallic alloys that return to their original form by changing phases (Martensite - Austenite) through thermal changes.
Dielectric Elastomer Actuators (DEA): Produce mechanical work as a result of the compression of an elastic film between two electrodes under the influence of an electric field.
3. Software and Control Architecture
The control of soft robots is quite complex due to the nonlinear nature of the material. At this point, Model Predictive Control (MPC) and Artificial Neural Networks (ANN) come into play.
Pneumatic Control Simulation with Python
The example below simulates a simple regression model and control loop that estimates the bending angle of a soft robot actuator based on pressure value.
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import minimize
classSoftActuator:
def__init__(self, stiffness, damping):
self.k = stiffness # Material stiffness self.b = damping # Damping coefficient self.angle =0.0defdynamic_model(self, pressure, dt):
"""
Simple second-order dynamic model:
I * alpha = Torque_p - k * theta - b * omega
""" target_angle = pressure *1.5# Pressure-Angle relationship (linear assumption) angular_velocity = (target_angle - self.angle) * self.k - (self.b * self.angle)
self.angle += angular_velocity * dt
return self.angle
# Control Loopactuator = SoftActuator(stiffness=0.5, damping=0.1)
time_steps = np.linspace(0, 10, 100)
pressures = np.sin(time_steps) *10+15# Variable pressure inputangles = []
for p in pressures:
current_angle = actuator.dynamic_model(p, dt=0.1)
angles.append(current_angle)
print("Simulation completed. Maximum bending angle:", max(angles))
4. Sensor Integration and Flexible Sensors
Rigid sensors cannot be used for a soft robot to gain “proprioception” ability. Instead, sensors that can stretch with the body are preferred:
Liquid Metal Sensors (EGaIn): Eutectic gallium-indium alloys injected into micro-channels convey strain information by showing resistance change during stretching.
Fiber Optic Sensors (FBG): Provide high-precision bending data by measuring changes in the refractive index of light.
5. Software Resources and Libraries
The basic software ecosystem used in soft robotics research is as follows:
SOFA Framework (Soft Robotics Toolkit): The industry standard for real-time physical simulation of soft bodies. It is C++ based and has Python wrappers.
PyElastica: A Python library optimized for the simulation of rod-like soft structures (Cosserat Rod theory).
Abaqus/ANSYS: Used for hyperelastic stress tests of material in the Finite Element Analysis (FEA) phase.
ROS (Robot Operating System): Manages the communication layer between sensor fusion and motor drivers of flexible robots.
6. Manufacturing Techniques in Engineering Design
Traditional machining is not suitable for soft robotics. Instead, Soft Lithography and Additive Manufacturing techniques are used.
Soft Lithography
Robots with complex internal channels are produced by casting silicone elastomers (e.g., Ecoflex, Dragon Skin) into rigid molds printed with a 3D printer. At this stage, the material’s viscosity and curing time have a direct effect on the final product’s Young’s Modulus.
Direct Ink Writing (DIW)
Monolithic structures where sensors and actuators are combined into a single piece are created by directly extruding functional inks (conductive polymers, hydrogels).
7. Future Vision and Hybrid Systems
The payload and precision problems of fully soft robots are directing engineers toward Rigid-Soft Hybrid systems. These structures consist of a rigid internal structure that carries the load and a soft outer coating that adapts to the environment, similar to creatures with skeletal systems.
Technical Notes:
Hysteresis Problem: Soft materials may not immediately return to their original state when the load is removed. This delay (hysteresis) must be compensated for in control algorithms.
Proprioception: Data-driven models based on “Deep Learning” yield more successful results than analytical models for a soft robot to estimate its own shape in real-time.
Conclusion
Soft robotics is an interdisciplinary field that pushes the boundaries of mechanical design. This technology, located at the intersection of material science, fluid mechanics, and advanced control theory, is changing the robotics paradigm in a wide range of fields from surgery to search and rescue efforts. The systems of the future will not just be machines that carry out commands, but adaptive structures that interact with the physical environment in an “embodied intelligence.”