We use cookies and other tracking technologies to improve your browsing experience on our website, to show you personalized content and targeted ads, to analyze our website traffic, and to understand where our visitors are coming from.
⚠️
GDPR & Cookie Policy Notice
In accordance with data protection regulations; the use of mandatory cookies is required for the core functions of our website to operate, ensure data security, and perform analytics. If you reject the use of cookies, it is not possible to benefit from the services on our website due to technical limitations and data synchronization interruptions. You must consent to the use of cookies to access the content on our site.
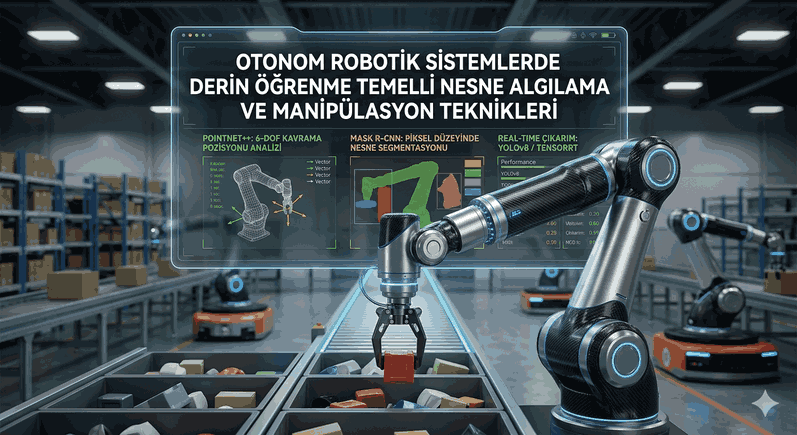
Deep Learning-Based Object Detection and Manipulation Techniques in Autonomous Robotic Systems
The core pillars of modern robotic systems—object recognition and grasping processes—are shifting away from traditional computer vision methods and are being built entirely on Deep Learning architectures. For a robot to interact with the physical world, it must not only know the coordinates of an object but also analyze the object’s geometric structure, material properties, and approach angles.
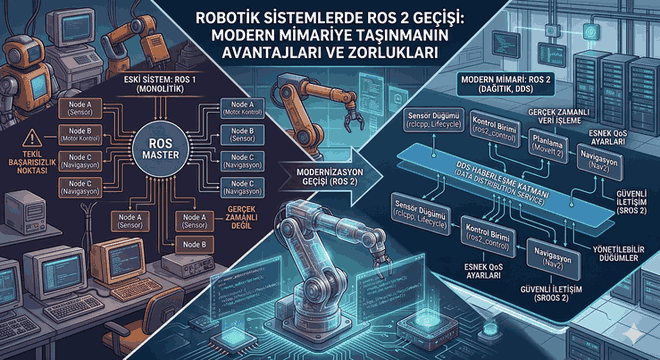
Figure 1: Deep Learning-Based Object Detection and Manipulation Techniques in Autonomous Robotic Systems.
Deep Learning-Based Object Detection Architectures
Real-time inference is of vital importance in robotic systems. At this point, two fundamental approaches stand out: one-stage detectors and two-stage detectors.
YOLO (You Only Look Once) Series: It is the most preferred architecture for robotic arms. By dividing the image into a grid, it simultaneously predicts object probabilities and bounding box coordinates for each cell. YOLOv8 and later versions are optimized for mobile robotic platforms, especially with low latency.
Faster R-CNN: Used in precision assembly tasks requiring higher accuracy. It identifies object candidates via a Region Proposal Network (RPN) and then performs classification.
Example Application: A Simple Object Detection Interface with PyTorch
The code block below demonstrates the basic logic of performing object detection by loading a pre-trained model in a robotic vision system:
import torch
import cv2
# Loading model (YOLOv5 example)model = torch.hub.load('ultralytics/yolov5', 'yolov5s', pretrained=True)
defdetect_objects(frame):
# Performing inference on the image results = model(frame)
# Getting coordinates and classes predictions = results.pandas().xyxy[0]
for index, row in predictions.iterrows():
x1, y1, x2, y2 = int(row['xmin']), int(row['ymin']), int(row['xmax']), int(row['ymax'])
label = row['name']
conf = row['confidence']
# Calculating center point for robotic control center_x = (x1 + x2) //2 center_y = (y1 + y2) //2 cv2.rectangle(frame, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.putText(frame, f"{label}{conf:.2f}", (x1, y1-10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 2)
return frame, predictions
# Testing via camera streamcap = cv2.VideoCapture(0)
while cap.isOpened():
ret, frame = cap.read()
ifnot ret: break output_frame, _ = detect_objects(frame)
cv2.imshow('Robot Vision', output_frame)
if cv2.waitKey(1) &0xFF== ord('q'): breakcap.release()
cv2.destroyAllWindows()
6-Degree of Freedom (6-DoF) Grasping Strategies
Recognizing an object is not sufficient to grasp it successfully. The robot needs to calculate the angle from which to approach the object (pose estimation) and where to place the fingers of the gripper.
GPD (Grasp Pose Detection) and PointNet++
3D data processing has become standard in robotic manipulation. Point Cloud data from RGB-D cameras are processed with architectures like PointNet++ or PointCNN to extract the surface normals of the object. Grasp point determination algorithms generate thousands of candidate grasp angles on this data and assign a “success score” to each.
Datasets and Libraries
The primary resources used in robotic vision development are as follows:
OpenCV: Image pre-processing and filtering.
PCL (Point Cloud Library): Industry standard for 3D data processing.
ROS 2 (Robot Operating System): Middleware that enables communication between algorithms and hardware.
MoveIt: Advanced framework used for path planning.
Grasping with Deep Reinforcement Learning
In complex scenarios where classical algorithms fail (for example, overlapping irregular objects), Deep RL comes into play. The robot learns the most accurate grasping strategy by trial and error thousands of times in a simulation environment (Nvidia Isaac Gym or PyBullet).
Q-Learning Architecture: Each movement (action) of the robot is evaluated with the reward received from the environment (successful grasp). The neural network tries to maximize the $Q(s, a)$ value, which is the expected total future reward of an action ($a$) taken in a specific state ($s$).
$$Q(s, a) \leftarrow Q(s, a) + \alpha [r + \gamma \max_{a'} Q(s', a') - Q(s, a)]$$
In this equation, $\alpha$ represents the learning rate, and $\gamma$ represents the importance of future rewards (discount factor).
Segmentation and Masking: Mask R-CNN and SAM
Using only a bounding box increases the margin of error in precision grasping operations because it does not define the exact boundaries of the object. Instance Segmentation techniques mask the object at the pixel level. SAM (Segment Anything Model), developed by Meta, has revolutionized robotic vision with its zero-shot learning capability. The robot can instantly grasp the form of an object it has never seen before.
Hardware and Software Integration: Jetson and TensorRT
High computational power is required to run artificial intelligence models on a robot. Embedded systems like the NVIDIA Jetson series optimize deep learning models thanks to their CUDA cores. By using the TensorRT library, PyTorch or TensorFlow models can be reduced to FP16 or INT8 precision, increasing inference speed up to 10 times.
Technical Note: In robotic applications, deterministic operation is just as important as the accuracy of the model. Fluctuations in latency (jitter) can lead to instabilities in the control loop and mechanical damage.
Future Projection: End-to-End Learning
Future robotic systems will not execute object recognition and motion planning as separate modules, but through a single neural network. Thanks to Vision-Language-Action (VLA) models, the robot will be able to map natural language commands, such as “Pick up the red mug on the table and put it next to the coffee machine,” directly to visual data and convert them into motor torque values.
This technological transformation is initiating a new era not only in factories but also in home assistant robots and autonomous systems used in search and rescue operations. The flexibility of deep learning enables robots to gain human-like adaptation skills in dynamic and unpredictable environments.