We use cookies and other tracking technologies to improve your browsing experience on our website, to show you personalized content and targeted ads, to analyze our website traffic, and to understand where our visitors are coming from.
⚠️
GDPR & Cookie Policy Notice
In accordance with data protection regulations; the use of mandatory cookies is required for the core functions of our website to operate, ensure data security, and perform analytics. If you reject the use of cookies, it is not possible to benefit from the services on our website due to technical limitations and data synchronization interruptions. You must consent to the use of cookies to access the content on our site.
Collective Intelligence and Dynamic Task Allocation in Swarm Robotic Systems
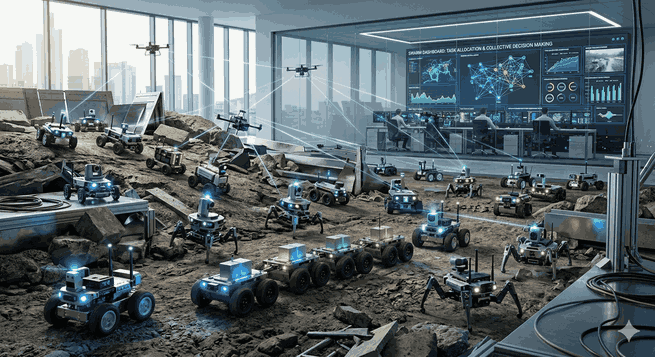
Swarm robotics is a sub-branch of robotics that focuses on decentralized control mechanisms, based on the collective behaviors exhibited by social organisms in nature (ants, bees, or birds). Instead of a single sophisticated robot, the goal is to perform complex tasks through the interaction of a large number of agents with limited capabilities.
Figure 1: Collective Intelligence and Dynamic Task Allocation in Swarm Robotic Systems.
1. Architectural Foundations: Transition from Centralization to Distributed Systems
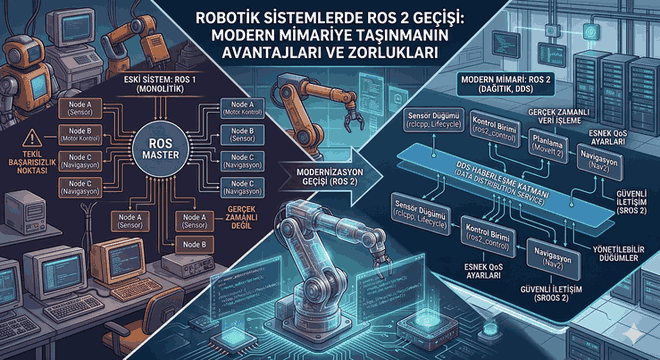
In classical robotics approaches, a “Central Control Unit” (MCU) collects all data and sends commands to each individual unit. However, in swarm systems, this leads to a single point of failure that can cause the entire system to crash. In distributed systems, on the other hand, each agent acts based on local information.
Principles of Swarm Robotics:
Scalability: An increase in the number of agents should not affect the complexity of the algorithm in a non-linear way.
Robustness: The failure of a few robots should not hinder the success of the mission.
Locality: Robots should only interact with peers in their immediate vicinity and the environment.
2. Collective Decision-Making Mechanisms
In swarm robots, decisions are not made by a leader; rather, they emerge as a result of individual interactions. This is explained through statistical mechanics and probabilistic models.
Majority Rule and Threshold Models
Agents observe the states of other agents in their environment. If a certain threshold of agents is exhibiting the same behavior, the individual also changes their decision in that direction. This is critical, especially in situations requiring “consensus.”
Probabilistic State Transitions
Robots transition from one state to another using Markov Chain models. For example, in a task involving transporting an object, the probability of calling for more assistance increases based on the weight of the object.
3. Dynamic Task Allocation Algorithms
Task allocation is the process of assigning roles to agents to maximize the total efficiency of the system. The most commonly used methods in the technical literature are:
Pheromone-Based Allocation (Stigmergy)
Inspired by the trail-following behavior of ants. Digital “pheromones” are data packets left by robots on the paths they traverse or on the tasks they complete. High pheromone density signifies the priority of that task or the efficiency of the path.
Market-Based Approaches (Auction-Based)
Agents “bid” for tasks. The robot capable of completing a task at the lowest cost (closest distance or highest energy level) takes on the task.
4. Software and Library Ecosystem
Specialized libraries exist to simulate swarm robotic systems and deploy them to real hardware:
ROS 2 (Robot Operating System): It is the standard for multi-robot communication with its distributed architecture and DDS (Data Distribution Service) layer.
ARGoS: A high-performance physics engine where thousands of robots can be simulated simultaneously.
Swarm-Sim: A Python-based tool used primarily for algorithmic tests and 2D/3D visualizations.
Mesa: A Python library used for agent-based modeling.
5. Technical Implementation: A Simple Task Allocation Simulation with Python
The code block below simulates a basic threshold algorithm where agents make decisions based on task density in their environment.
import numpy as np
classRobotAgent:
def__init__(self, id, threshold):
self.id = id
self.threshold = threshold
self.state ="IDLE"# Initial state is idle self.energy =100defdecide_task(self, stimulus):
"""
As the stimulus increases, the probability of the robot taking on the task increases.
P(active) = S^2 / (S^2 + T^2)
""" probability = (stimulus**2) / (stimulus**2+ self.threshold**2)
if np.random.rand() < probability:
self.state ="WORKING"else:
self.state ="IDLE"classSwarmController:
def__init__(self, num_robots):
self.robots = [RobotAgent(i, np.random.randint(10, 50)) for i in range(num_robots)]
self.task_demand =100# Initial task demanddefupdate_system(self):
active_workers =0for robot in self.robots:
robot.decide_task(self.task_demand)
if robot.state =="WORKING":
active_workers +=1# Task demand decreases based on the number of workers but increases over time self.task_demand = max(0, self.task_demand - active_workers +5)
print(f"Active Robots: {active_workers}, Remaining Demand: {self.task_demand}")
# Start the simulationswarm = SwarmController(50)
for step in range(10):
swarm.update_system()
6. Communication Protocols and Synchronization
In multi-agent systems, data transmission is generally carried out via UDP (User Datagram Protocol). The “handshake” overhead introduced by TCP leads to significant latency in an environment where hundreds of robots share real-time location data.
Pub/Sub Model
Robots subscribe to specific “topics.” For example, all robots subscribed to the /environment/obstacle channel are immediately notified of any obstacle detected by any agent. At this point, libraries such as Zenoh or FastDDS work integrated with ROS 2 for low-latency communication.
A mathematical model used for swarm robots to find the optimal solution (e.g., the source of a gas leak). Each robot (particle) tracks its own best position ($p_{best}$) and the swarm’s global best position ($g_{best}$).
Here, $w$ represents the inertia coefficient, and $c_1$ and $c_2$ represent the learning parameters.
8. Swarm Robotics at the Hardware Level
No matter how powerful software algorithms are, physical constraints always exist. In swarm studies, platforms that are low-cost but have high sensor capacity are generally preferred.
Kilobots: Miniature robots developed by Harvard University that can be used in the thousands.
e-puck2: Micro-robots focused on education and research with a rich sensor set.
Crazyflie: An open-source platform ideal for flying robot (drone) swarm studies.
Important Note: In real-world applications, collision avoidance algorithms such as Artificial Potential Fields (APF) or Velocity Obstacles (VO) must be integrated into the task allocation code to prevent robots from colliding with each other.
9. Future Perspective: Heterogeneous Swarms
Current research is shifting from “homogeneous” swarms, where all robots have the same characteristics, to “heterogeneous” swarms with different capabilities (some flying, some ground-based, some with high processing power). In these systems, task allocation becomes not just distance-based, but capability-aware.
For example, in a search and rescue scenario, drones are optimized to scan the area (reconnaissance mission), while tracked robots are optimized to transport objects under debris (manipulation mission).
10. Conclusion and Assessment
Swarm robotic systems are an engineering marvel where individual simplicity transforms into collective complexity. Dynamic task allocation provided by multi-agent algorithms increases the flexibility and survival capability of the system. On the software side, modern libraries like ROS 2 and mathematical models like PSO enable these systems to move from theory to practice. In the future, these systems will take on critical roles across a wide spectrum, from agricultural automation to the defense industry, and even to microrobots delivering medication within the human body.