We use cookies and other tracking technologies to improve your browsing experience on our website, to show you personalized content and targeted ads, to analyze our website traffic, and to understand where our visitors are coming from.
⚠️
GDPR & Cookie Policy Notice
In accordance with data protection regulations; the use of mandatory cookies is required for the core functions of our website to operate, ensure data security, and perform analytics. If you reject the use of cookies, it is not possible to benefit from the services on our website due to technical limitations and data synchronization interruptions. You must consent to the use of cookies to access the content on our site.
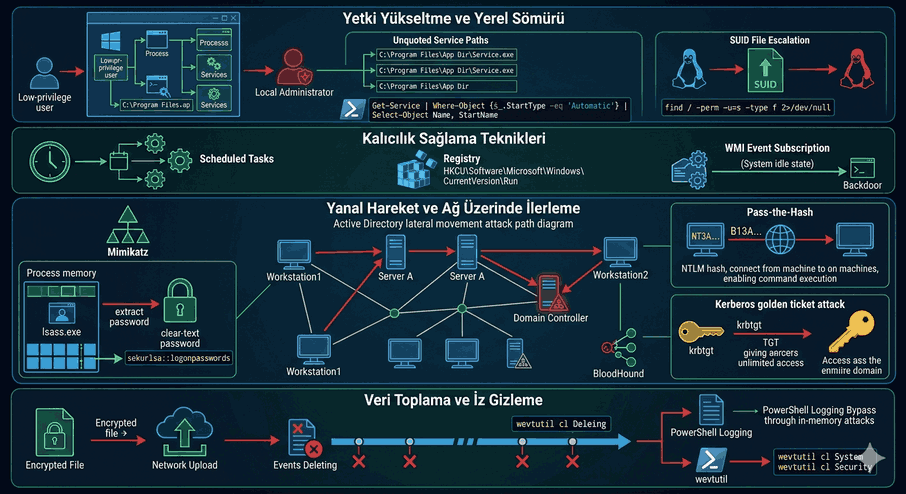
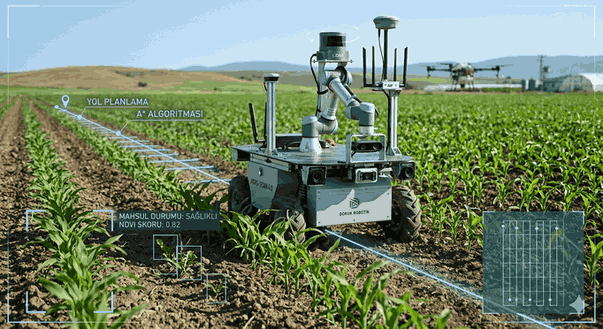
The Evolution of Robotic Systems and Modern Migration Strategies to the ROS 2 Ecosystem
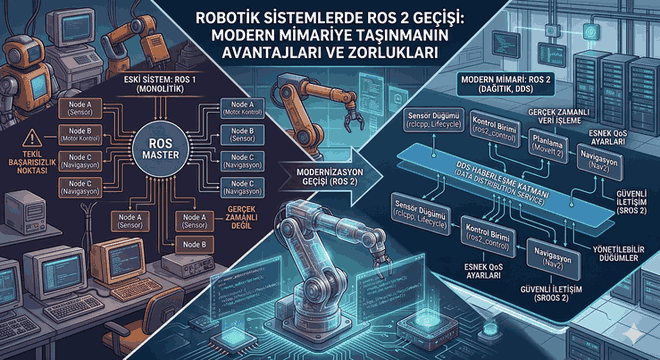
The world of robotics has undergone a massive evolution over the last decade, shifting from monolithic structures to distributed and modular architectures. Robot Operating System (ROS), which sits at the center of this evolution—particularly with versions like “Lush” and “Noetic”—has set academic and industrial standards. However, modern needs such as real-time data processing, industrial safety standards, and multi-robot coordination have begun to push the limits of the original ROS architecture. At this point, ROS 2, with its new architecture built upon the Data Distribution Service (DDS) layer, is moving robotic systems out of the laboratory environment and into critical industrial operational fields.
Figure 1: The Evolution of Robotic Systems and Modern Migration Strategies to the ROS 2 Ecosystem.
1. Architectural Paradigm Shift from ROS 1 to ROS 2
The ROS 1 architecture was based on a central registry called “ROS Master.” All nodes needed this center to find each other. This created a “Single Point of Failure” risk. ROS 2 completely abandoned this structure and switched to the DDS (Data Distribution Service) standard.
Technical Advantages of the DDS Layer
DDS is a decentralized communication protocol used in industrial, aerospace, and military systems. Building ROS 2 on this layer provides the following technical gains:
Discovery: Nodes find each other dynamically; they do not need a central server.
Quality of Service (QoS): Parameters such as data packet priority, reliability, and persistence (durability) can be configured on a per-topic basis.
Real-Time Capability: ROS 2 offers a deterministic structure that can integrate with real-time operating systems (RTOS).
2. Software Architecture and Library Modernization
One of the biggest challenges when migrating legacy systems to ROS 2 is that the client libraries (rclcpp and rclpy) have been completely rewritten. The roscpp and rospy libraries in ROS 1 have been replaced by a more modular and performance-focused structure.
Lifecycle Nodes and Manageability
The “Managed Nodes” concept introduced with ROS 2 allows direct control of a robot’s state machine. The ability of a node to transition between Unconfigured, Inactive, Active, and Finalized states ensures that the system is started safely and stopped in a controlled manner in case of an error.
In legacy systems, motor drivers and sensors were often controlled via complex and non-standard interfaces. With ROS 2, the ros2_control framework standardized the Hardware Abstraction Layer (HAL).
Modern Hardware Interfaces
Thanks to the HardwareComponentInfo and SystemInterface structures, a controller written for a robot arm or an autonomous mobile platform (AMR) can remain the same even if the hardware changes. This enables dynamic loading and unloading of controllers via the “Controller Manager.”
Important Libraries:
nav2 (Navigation 2): Advanced navigation stack developed for ROS 2 that uses Behavior Trees.
MoveIt 2: The ROS 2 version of the industry-standard library for planning and manipulation of robot arms.
Fast-DDS / CycloneDDS: Popular DDS implementations used in the communication layer.
4. Critical Challenges in the Migration Process
The modernization process is not just about copying code. The main obstacles encountered are:
Message Types and Conversion (The Bridge)
The ros1_bridge is used in cases where ROS 1 and ROS 2 systems need to work together. However, this bridge can create significant latency and CPU load during high-frequency data streams (e.g., LiDAR data). Therefore, it is recommended that critical systems be modernized with a module-based full migration rather than a gradual one.
Build System: From Catkin to Colcon
catkin_make in ROS 1 has been replaced by the colcon build system. package.xml files used in package definitions must now support the format 3 standard. Furthermore, CMake configurations must be revised to use the ament_cmake library.
5. Security Layer: SROS 2
The weakest link in traditional robotic systems was cybersecurity. ROS 2 offers built-in security at the communication layer with the SROS 2 plugin.
Authentication: Only authorized nodes can join the network.
Encryption: Data packets are encrypted with AES-GCM algorithms.
Access Control: It is defined in detail which node can write to or read from which topic.
6. Application Example: A Modern Subscriber Structure
The code fragment below demonstrates a modern subscriber example with QoS (Quality of Service) settings configured using the ROS 2 C++ API. This structure is optimized for telemetry data where data loss is unacceptable.
While migrating legacy robotic architectures to ROS 2 may initially seem like a high engineering cost, it is a necessity for the scalability and security of the system in the long run. DDS-based communication, advanced real-time capabilities, and rich library support transform robots from just “autonomous vehicles” into “smart ecosystems” that work in integration with each other and cloud systems.
The best approach in the modernization process is to start from the hardware layer of the system and integrate it into the ros2_control structure, and then move the navigation/planning layers to current standards such as Nav2 and MoveIt 2. Future robotic systems will be shaped by artificial intelligence algorithms built upon this modern architecture.
Technical Note: Attention should be paid to memory management during the migration process. The UniquePtr and SharedPtr mechanisms used in ROS 2, when combined with the loaned messages feature for zero-copy data transfer, can reduce CPU usage by up to 30% for high-bandwidth sensor data.