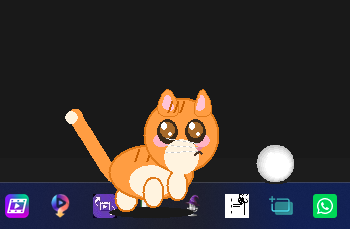
An Intruder on the Desktop: Virtual Cat and Mouse Chase Application with Python
Brought to life with Tkinter and pyautogui, this elegant simulation welcomes a 3D-effect ball that chases your mouse cursor and a cute, Chibi-style cat that pursues it with smooth animations right onto your desktop. With v2.0.0.0, it now works across all of your monitors and speaks English out of the box (the app itself defaults to Turkish, but switching to English — or any language you like — takes one line in a settings file). Whispering to you via aesthetic speech bubbles during long periods of inactivity, this lovely friend adds a warm joy to your digital workspace with click-through functionality and asynchronous purring sounds.
blog
python
tkinter
simulation
open-source
entertainment
multi-language
cat
catslovers