We use cookies and other tracking technologies to improve your browsing experience on our website, to show you personalized content and targeted ads, to analyze our website traffic, and to understand where our visitors are coming from.
⚠️
GDPR & Cookie Policy Notice
In accordance with data protection regulations; the use of mandatory cookies is required for the core functions of our website to operate, ensure data security, and perform analytics. If you reject the use of cookies, it is not possible to benefit from the services on our website due to technical limitations and data synchronization interruptions. You must consent to the use of cookies to access the content on our site.
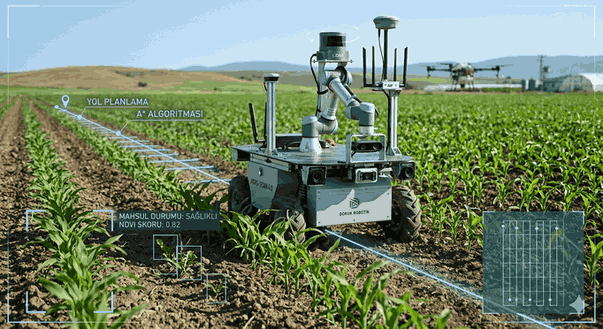
Agriculture 4.0 and Next-Generation Approaches in Autonomous Robotic Systems
Agriculture 4.0, which replaces traditional agricultural methods, represents an ecosystem where digitalization and automation are integrated at the highest level. Autonomous agricultural vehicles, which are at the center of this transformation, not only reduce the need for human labor but also move operational efficiency and precision to mathematical certainty.
Figure 1: Agriculture 4.0 and Next-Generation Approaches in Autonomous Robotic Systems.
Dynamic Path Planning and Navigation in Autonomous Vehicles
Agricultural lands are among the most challenging operating environments for autonomous systems due to their unstructured nature. Obstacle detection, slope analysis, and variable terrain structures necessitate going beyond static path planning algorithms.
Hybrid A* and Model Predictive Control (MPC)
For an autonomous tractor or robotic platform, path planning is generally carried out in two stages: global and local planning. While the A (A-Star)* algorithm determines the shortest path over the costmap of the terrain at the global level, the Model Predictive Control (MPC) optimizes the route in real-time by taking into account the physical constraints of the vehicle (steering angle, speed limit, inertia).
In modern systems, the Hybrid A* algorithm, which includes the kinematic constraints of the vehicle, is preferred. This algorithm uses Reeds-Shepp or Dubins curves, which simulate the vehicle’s turning radius while transitioning between nodes.
Localization with GNSS and IMU Fusion
GPS alone is not sufficient for centimeter-level positioning, which is the foundation of autonomous driving. RTK (Real-Time Kinematic) GPS data is combined with data from the IMU (Inertial Measurement Unit) placed on the vehicle’s body via an Extended Kalman Filter (EKF) or Unscented Kalman Filter (UKF). This fusion ensures that the vehicle can estimate its position with high accuracy even during signal outages.
Deep Learning-Based Crop Monitoring and Spectral Analysis
Crop monitoring covers the processes of plant health detection, weed control, and yield estimation. In this process, computer vision techniques offer a depth of data beyond traditional sensors.
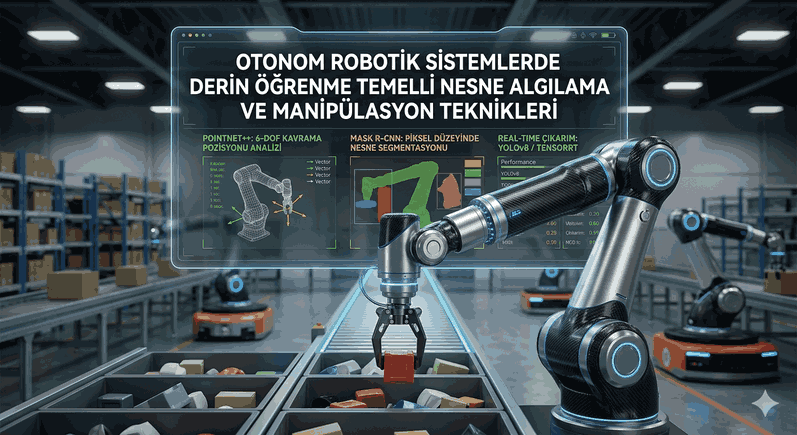
Semantic Segmentation and Object Detection
Agricultural robots use architectures such as YOLOv8 or Mask R-CNN to distinguish crops from weeds via the RGB-D cameras on them. Plant-based segmentation allows the robot to apply fertilizer or pesticide only to the target plant, which can reduce chemical usage by up to 90%.
NDVI and Multispectral Imaging
Plant health is hidden in the near-infrared (NIR) light spectrum, which cannot be seen with the naked eye. The NDVI (Normalized Difference Vegetation Index) calculation is used to measure the plant’s photosynthetic activity:
$$NDVI = \frac{NIR - RED}{NIR + RED}$$
This data is collected with multispectral sensors integrated into drones or robotic arms, and a “prescription map” of the land is created.
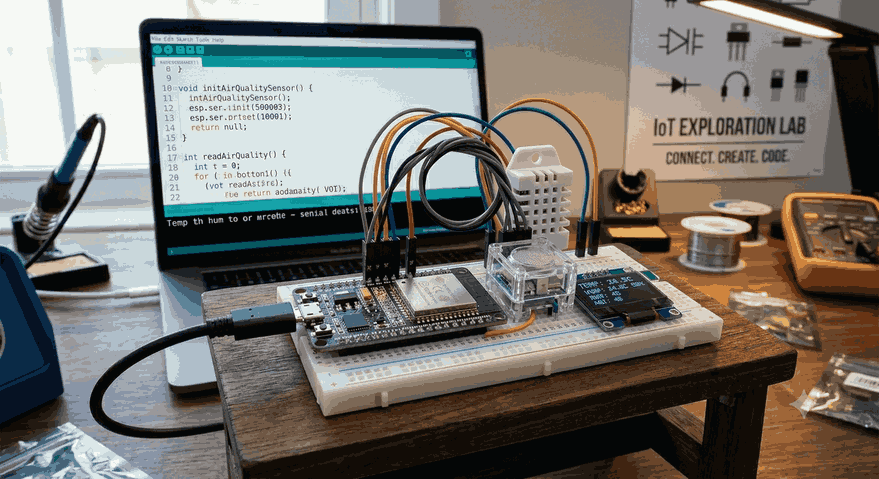
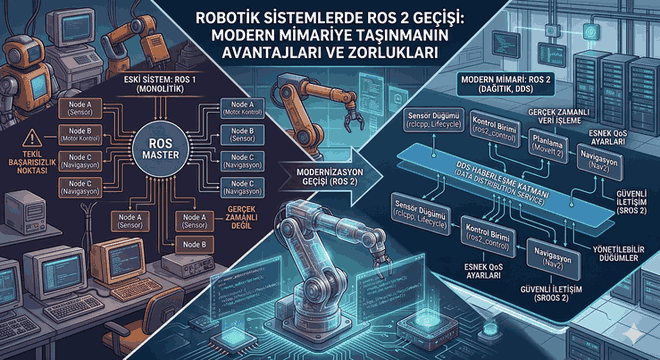
Software Architecture and Technical Implementation
The software stack of an Agriculture 4.0 robot is usually built on ROS 2 (Robot Operating System). ROS 2 facilitates the processing of complex sensor data with its distributed structure and real-time capabilities.
A Simple Python-Based Obstacle Avoidance and Navigation Logic
Below is a conceptual Python-based code example that establishes a simple orientation decision mechanism according to data coming from a robot’s distance sensors:
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import LaserScan
from geometry_msgs.msg import Twist
classOrchardNavigator(Node):
def__init__(self):
super().__init__('orchard_navigator')
self.publisher_ = self.create_publisher(Twist, '/cmd_vel', 10)
self.subscription = self.create_subscription(LaserScan, '/scan', self.scan_callback, 10)
self.twist = Twist()
defscan_callback(self, msg):
# Check the center angle (front) in Lidar data front_dist = msg.ranges[len(msg.ranges)//2]
if front_dist <1.0: # If there is an obstacle within 1 meter self.get_logger().info('Obstacle detected! Turning...')
self.twist.linear.x =0.0 self.twist.angular.z =0.5# Counter-clockwise turnelse:
self.twist.linear.x =0.3# Move forward self.twist.angular.z =0.0 self.publisher_.publish(self.twist)
defmain(args=None):
rclpy.init(args=args)
node = OrchardNavigator()
rclpy.spin(node)
rclpy.shutdown()
if __name__ =='__main__':
main()
Libraries and Toolkits Used
OpenCV & Open3D: For image processing and 3D point cloud analysis.
PyTorch / TensorFlow: For training and inference of plant disease detection models.
GDAL / PDAL: For geographic data analysis and LiDAR data processing workflows.
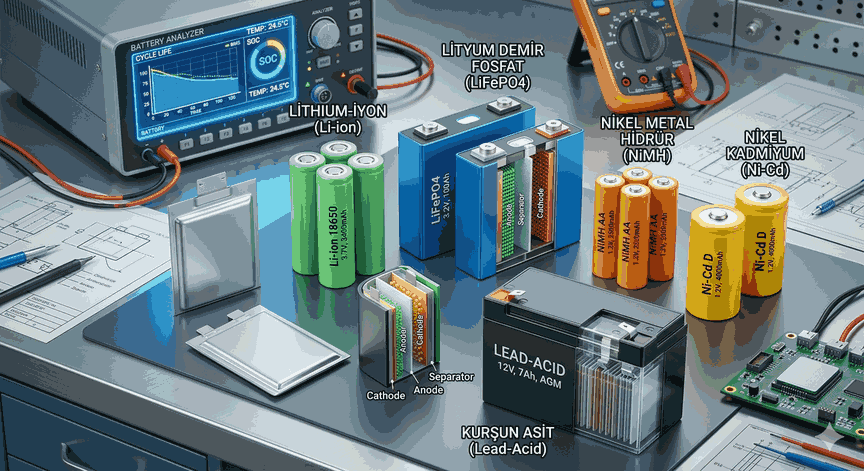
Data Communication and Edge Computing in Autonomous Systems
Limited internet connectivity in agricultural lands necessitates processing data in the field (Edge Computing) rather than in the cloud. Hardware such as NVIDIA Jetson or Google Coral allows for high-performance AI inference on the robot with low power consumption.
LoRaWAN and 5G Integration
While the low-power LoRaWAN protocol is used for inter-robot communication (V2V) and robot-infrastructure communication (V2I) in long-distance data transmission (telemetry), 5G technology plays a critical role for high-resolution video transfer.
Future Projection and Conclusion
Agriculture 4.0 is not just a continuation of mechanization, but the transformation of agricultural production into a “software problem.” The evolution of autonomous path planning algorithms and the increase in precision in crop monitoring are the keys to sustainable food security. In the future, with the coordinated work of swarm robotics systems, managing massive lands with minimal energy and resource consumption will become the standard.
Technical Note: “Fail-safe” mechanisms should not be forgotten in the design of autonomous vehicles. A hardware “Emergency Stop” (E-Stop) line should be structured to cut the power circuit independently of all software layers. Additionally, when using SLAM (Simultaneous Localization and Mapping) algorithms, LiDAR-based solutions have higher stability than visual SLAM in dusty and brightly lit environments.
The technological depth in this field relies on the seamless harmony between hardware engineering and advanced artificial intelligence algorithms. The greatest challenge for developers is adapting models from laboratory environments to the unpredictable and harsh conditions of the field.