Size daha iyi hizmet sunabilmek için çerezleri kullanıyoruz.
Web sitemizde gezinme deneyiminizi geliştirmek, size kişiselleştirilmiş içerik ve hedefli reklamlar göstermek, web sitesi trafiğimizi analiz etmek ve ziyaretçilerimizin nereden geldiğini anlamak için çerezleri ve diğer izleme teknolojilerini kullanıyoruz.
⚠️
KVKK ve Çerez Politikası Bilgilendirmesi
6698 sayılı Kişisel Verilerin Korunması Kanunu (KVKK) ve Aydınlatma Yükümlülüğü kapsamında; web sitemizin temel fonksiyonlarının çalışabilmesi, veri güvenliğinin sağlanması ve performans analizi yapılabilmesi için zorunlu çerezlerin kullanımı gerekmektedir. Çerez kullanımını reddetmeniz halinde, teknik imkansızlıklar ve veri senkronizasyonu kesintileri nedeniyle web sitemizdeki hizmetlerden yararlanmanız mümkün olmamaktadır. Sitemizdeki içeriklere erişebilmek için çerez kullanımını onaylamanız gerekmektedir.
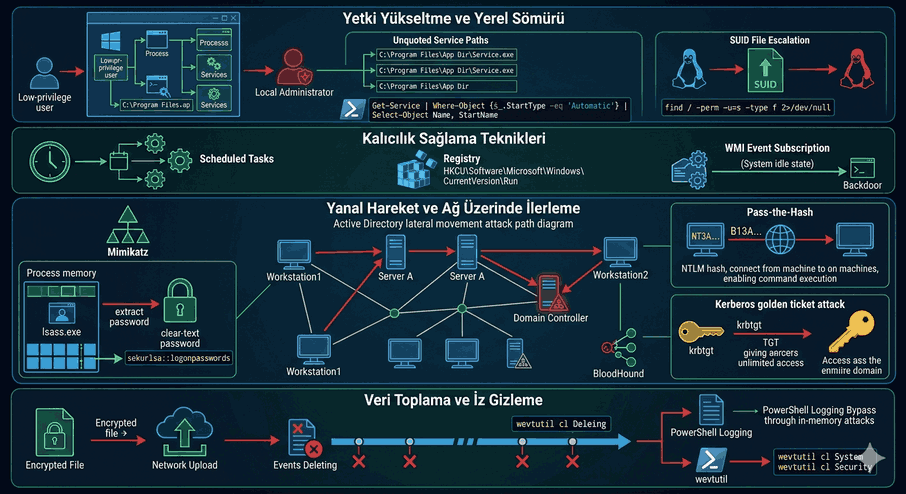
Tarım 4.0 ve Otonom Robotik Sistemlerde Yeni Nesil Yaklaşımlar
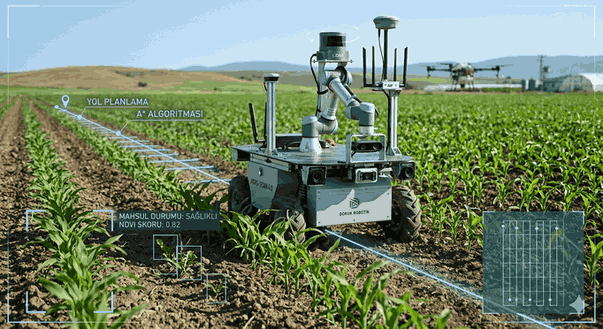
Geleneksel tarım metotlarının yerini alan Tarım 4.0, dijitalleşme ve otomasyonun en üst seviyede entegre edildiği bir ekosistemi temsil etmektedir. Bu dönüşümün merkezinde yer alan otonom tarım araçları, yalnızca insan gücüne olan ihtiyacı azaltmakla kalmayıp, operasyonel verimliliği ve hassasiyeti matematiksel bir kesinliğe taşımaktadır.
Şekil 1: Tarım 4.0 ve Otonom Robotik Sistemlerde Yeni Nesil Yaklaşımlar.
Otonom Araçlarda Dinamik Yol Planlama ve Navigasyon
Tarım arazileri, yapılandırılmamış doğası gereği otonom sistemler için en zorlu çalışma alanlarından biridir. Engel tespiti, eğim analizi ve değişken zemin yapısı, statik yol planlama algoritmalarının ötesine geçilmesini zorunlu kılar.
Hibrit A* ve Model Öngörülü Kontrol (MPC)
Otonom bir traktör veya robotik platform için yol planlama, genellikle global ve lokal planlama olmak üzere iki aşamada gerçekleştirilir. Global seviyede A (A-Star)* algoritması, arazinin maliyet haritası (costmap) üzerinden en kısa yolu belirlerken; lokal seviyede Model Öngörülü Kontrol (MPC), aracın fiziksel sınırlarını (direksiyon açısı, hız limiti, atalet) hesaba katarak rotayı gerçek zamanlı olarak optimize eder.
Modern sistemlerde, aracın kinematik kısıtlamalarını içeren Hybrid A* algoritması tercih edilir. Bu algoritma, düğümler arasında geçiş yaparken aracın dönüş yarıçapını simüle eden Reeds-Shepp veya Dubins eğrilerini kullanır.
GNSS ve IMU Füzyonu ile Lokalizasyon
Otonom sürüşün temeli olan santimetre hassasiyetindeki konumlandırma için sadece GPS yeterli değildir. RTK (Real-Time Kinematic) GPS verileri, aracın gövdesine yerleştirilen IMU (Inertial Measurement Unit) verileriyle Genişletilmiş Kalman Filtresi (EKF) veya Unscented Kalman Filter (UKF) aracılığıyla birleştirilir. Bu füzyon, sinyal kesilmelerinde dahi aracın konumunu yüksek doğrulukla tahmin etmesini sağlar.
Derin Öğrenme Tabanlı Mahsul İzleme ve Spektral Analiz
Mahsul izleme, bitki sağlığının tespiti, yabancı ot kontrolü ve verim tahmini süreçlerini kapsar. Bu süreçte bilgisayarlı görü (Computer Vision) teknikleri, geleneksel sensörlerin ötesinde bir veri derinliği sunar.
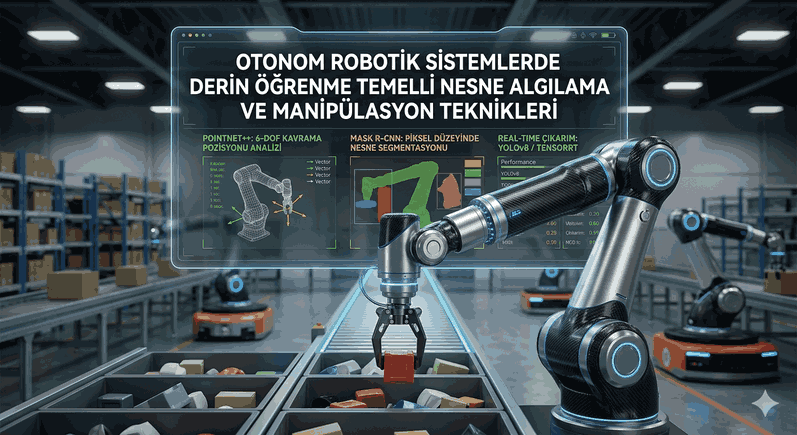
Semantik Segmentasyon ve Nesne Tespiti
Tarım robotları, üzerlerindeki RGB-D kameralar aracılığıyla mahsulü yabancı ottan ayırmak için YOLOv8 veya Mask R-CNN gibi mimarileri kullanır. Bitki bazlı segmentasyon, robotun yalnızca hedef bitkiye gübre veya ilaç uygulamasına olanak tanıyarak kimyasal kullanımını %90’a varan oranlarda azaltabilir.
NDVI ve Multispektral Görüntüleme
Bitki sağlığı, çıplak gözle görülemeyen yakın kızılötesi (NIR) ışık spektrumunda gizlidir. NDVI (Normalized Difference Vegetation Index) hesaplaması, bitkinin fotosentetik aktivitesini ölçmek için kullanılır:
$$NDVI = \frac{NIR - RED}{NIR + RED}$$
Bu veri, drone’lar veya robotik kollar üzerine entegre edilmiş multispektral sensörler ile toplanır ve arazinin “reçete haritası” oluşturulur.
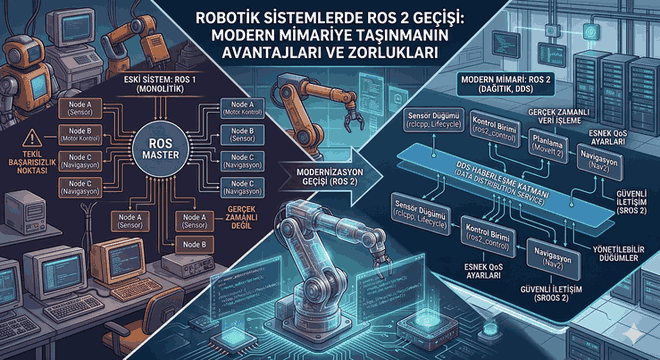
Yazılım Mimarisi ve Teknik Uygulama
Bir Tarım 4.0 robotunun yazılım yığını genellikle ROS 2 (Robot Operating System) üzerinde inşa edilir. ROS 2, dağıtık yapısı ve gerçek zamanlı yetenekleri ile karmaşık sensör verilerinin işlenmesini kolaylaştırır.
Python ile Basit Bir Engel Kaçınma ve Navigasyon Mantığı
Aşağıda, bir robotun mesafe sensörlerinden gelen veriye göre basit bir yönelim karar mekanizması kuran Python tabanlı kavramsal bir kod örneği yer almaktadır:
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import LaserScan
from geometry_msgs.msg import Twist
classOrchardNavigator(Node):
def__init__(self):
super().__init__('orchard_navigator')
self.publisher_ = self.create_publisher(Twist, '/cmd_vel', 10)
self.subscription = self.create_subscription(LaserScan, '/scan', self.scan_callback, 10)
self.twist = Twist()
defscan_callback(self, msg):
# Lidar verisindeki merkez açıyı (ön tarafı) kontrol et front_dist = msg.ranges[len(msg.ranges)//2]
if front_dist <1.0: # 1 metre içinde engel varsa self.get_logger().info('Engel tespit edildi! Dönüş yapılıyor...')
self.twist.linear.x =0.0 self.twist.angular.z =0.5# Saat yönü tersine dönüşelse:
self.twist.linear.x =0.3# İleri hareket self.twist.angular.z =0.0 self.publisher_.publish(self.twist)
defmain(args=None):
rclpy.init(args=args)
node = OrchardNavigator()
rclpy.spin(node)
rclpy.shutdown()
if __name__ =='__main__':
main()
Kullanılan Kütüphaneler ve Araç Setleri
OpenCV & Open3D: Görüntü işleme ve 3D nokta bulutu (Point Cloud) analizi için.
PyTorch / TensorFlow: Bitki hastalık tespiti modellerinin eğitimi ve çıkarımı için.
Nav2 (Navigation 2 Stack): ROS 2 tabanlı otonom navigasyon ve maliyet haritası yönetimi.
GDAL / PDAL: Coğrafi veri analizi ve LiDAR veri işleme süreçleri için.
Otonom Sistemlerde Veri Haberleşmesi ve Edge Computing
Tarım arazilerinde internet bağlantısının sınırlı olması, verilerin bulut yerine sahada işlenmesini (Edge Computing) zorunlu kılar. NVIDIA Jetson veya Google Coral gibi donanımlar, robot üzerinde düşük güç tüketimiyle yüksek performanslı AI çıkarımı yapılmasına imkan tanır.
LoraWAN ve 5G Entegrasyonu
Robotlar arası haberleşme (V2V) ve robot-altyapı haberleşmesi (V2I) için düşük güç tüketimli LoRaWAN protokolü, uzun mesafe veri iletiminde (telemetri) kullanılırken; yüksek çözünürlüklü video aktarımı için 5G teknolojisi kritik rol oynar.
Gelecek Projeksiyonu ve Sonuç
Tarım 4.0, yalnızca mekanizasyonun bir devamı değil, tarımsal üretimin bir “yazılım problemi” haline gelmesidir. Otonom yol planlama algoritmalarının evrimi ve mahsul izlemedeki hassasiyet artışı, sürdürülebilir gıda güvenliğinin anahtarıdır. Gelecekte, sürü robotik (swarm robotics) sistemlerinin koordineli çalışmasıyla, devasa arazilerin minimum enerji ve kaynak sarfiyatıyla yönetilmesi standart haline gelecektir.
Teknik Not: Otonom araçların tasarımında “fail-safe” mekanizmaları unutulmamalıdır. Donanımsal bir “Acil Durdurma” (E-Stop) hattı, tüm yazılım katmanlarından bağımsız olarak güç devresini kesebilecek yapıda olmalıdır. Ayrıca, SLAM (Simultaneous Localization and Mapping) algoritmaları kullanılırken, tozlu ve yoğun ışıklı ortamlarda görsel SLAM yerine LiDAR tabanlı çözümlerin stabilitesi daha yüksektir.
Bu alandaki teknolojik derinlik, donanım mühendisliği ile ileri seviye yapay zeka algoritmalarının kusursuz uyumuna dayanmaktadır. Geliştiriciler için en büyük zorluk, laboratuvar ortamındaki modelleri, tarlanın öngörülemez ve sert koşullarına adapte edebilmektir.