Size daha iyi hizmet sunabilmek için çerezleri kullanıyoruz.
Web sitemizde gezinme deneyiminizi geliştirmek, size kişiselleştirilmiş içerik ve hedefli reklamlar göstermek, web sitesi trafiğimizi analiz etmek ve ziyaretçilerimizin nereden geldiğini anlamak için çerezleri ve diğer izleme teknolojilerini kullanıyoruz.
⚠️
KVKK ve Çerez Politikası Bilgilendirmesi
6698 sayılı Kişisel Verilerin Korunması Kanunu (KVKK) ve Aydınlatma Yükümlülüğü kapsamında; web sitemizin temel fonksiyonlarının çalışabilmesi, veri güvenliğinin sağlanması ve performans analizi yapılabilmesi için zorunlu çerezlerin kullanımı gerekmektedir. Çerez kullanımını reddetmeniz halinde, teknik imkansızlıklar ve veri senkronizasyonu kesintileri nedeniyle web sitemizdeki hizmetlerden yararlanmanız mümkün olmamaktadır. Sitemizdeki içeriklere erişebilmek için çerez kullanımını onaylamanız gerekmektedir.
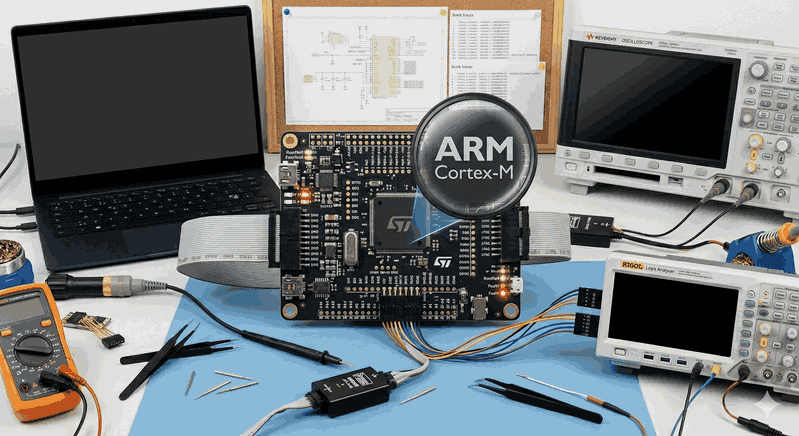
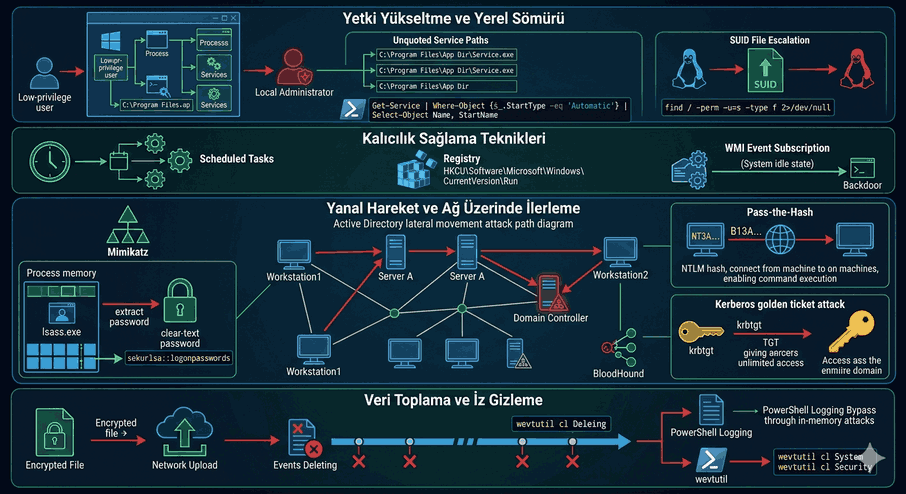
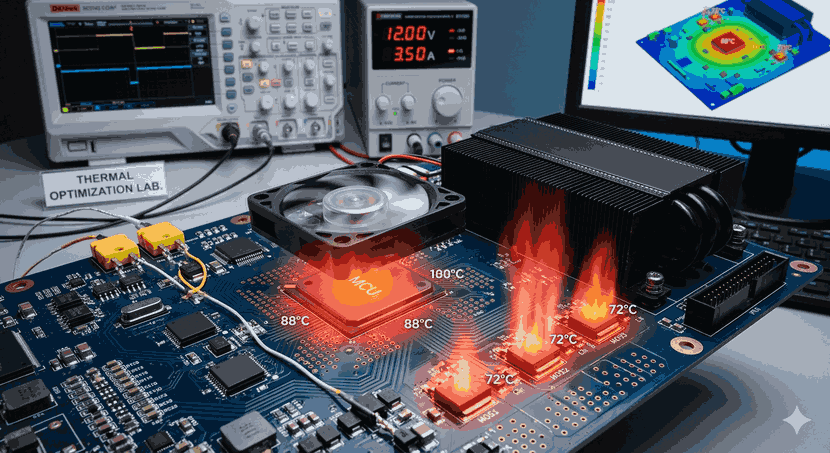
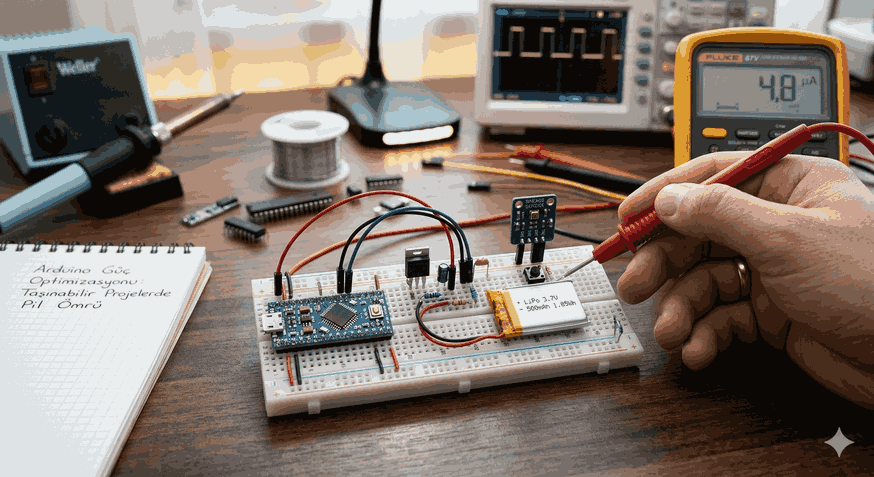
Gömülü Sistem Geliştirmede Profesyonel Hata Ayıklama Stratejileri ve Derinlemesine Analiz Teknikleri
Gömülü sistemler dünyasında bir hatayı ayıklamak, standart masaüstü yazılımlardan farklı olarak donanım kısıtları, gerçek zamanlı gereksinimler ve sınırlı görünürlük gibi engellerle mücadele etmeyi gerektirir. “Kod çalışıyor ama sistem neden kilitleniyor?” sorusu, her gömülü yazılım mühendisinin kabusudur. Bu yazıda, modern gömülü sistem projelerinde hataları hızlıca tespit etmek ve sistemi stabilize etmek için kullanılan ileri düzey teknikleri, kod örnekleri ve donanım mimarileri ele alınmıştır.
Şekil 1: Gömülü Sistem Geliştirmede Profesyonel Hata Ayıklama Stratejileri ve Derinlemesine Analiz Teknikleri.
1. Donanım Seviyesinde İzleme: JTAG ve SWD Protokollerinin Gücü
Modern mikrodenetleyicilerde (STM32, ESP32, NXP vb.) bulunan JTAG (Joint Test Action Group) ve SWD (Serial Wire Debug) arayüzleri, yazılımın donanım üzerindeki davranışını anlamak için birincil araçlardır. Sadece “breakpoint” koyup beklemek yeterli değildir; register seviyesinde analiz yapmak gerekir.
İleri Düzey Breakpoint Kullanımı
Çoğu geliştirici sadece satır bazlı duraklatma yapar. Ancak, Data Watchpoint and Trace (DWT) ünitesini kullanarak, belirli bir bellek adresindeki değer değiştiğinde işlemciyi durdurmak çok daha etkilidir. Bu, özellikle “Stack Overflow” veya bir pointer hatası nedeniyle bozulan değişkenleri yakalamak için eşsizdir.
// ARM Cortex-M serisinde DWT ile bir adresi izlemek için register konfigürasyonu (Temsili)
voidsetup_watchpoint(uint32_t address) {
CoreDebug->DEMCR |= CoreDebug_DEMCR_TRCENA_Msk; // Trace ünitesini aktif et
DWT->CYCCNT =0;
DWT->COMP0 = address; // İzlenecek bellek adresi
DWT->FUNCTION0 =0x00000001; // Yazma işlemi yapıldığında durdur
}
Not: Donanım breakpoint’lerinin sayısı sınırlıdır (genellikle 2 ile 8 arası). Bu yüzden karmaşık mantıksal hatalarda “Conditional Breakpoints” (Koşullu Durak noktaları) kullanmak, IDE üzerinde filtreleme yapmanıza olanak tanır.
2. Gerçek Zamanlı Analiz İçin Serial Wire Viewer (SWV) ve ITM
Print-f fonksiyonunu standart UART üzerinden kullanmak, sistemin zamanlamasını bozar (Heisenbug etkisi). UART nispeten yavaştır ve işlemciyi meşgul eder. Bunun yerine ARM mimarisindeki Instrumentation Trace Macrocell (ITM) kullanılarak loglar çok daha yüksek hızlarda ve CPU’yu neredeyse hiç yormadan dışarı aktarılabilir.
Loglama Stratejisi
Loglar sadece “Hata oluştu” dememeli, hatanın gerçekleştiği context (bağlam) bilgisini de içermelidir.
#include"stm32f4xx.h"// ITM üzerinden karakter gönderme
int_write(int file, char*ptr, int len) {
for (int i =0; i < len; i++) {
ITM_SendChar((*ptr++));
}
return len;
}
// Kullanım örneği
voidDMA_IRQHandler(void) {
if (DMA1->HISR & DMA_HISR_TEIF4) {
printf("[ERROR] DMA Transfer Error at Tick: %lu\n", HAL_GetTick());
}
}
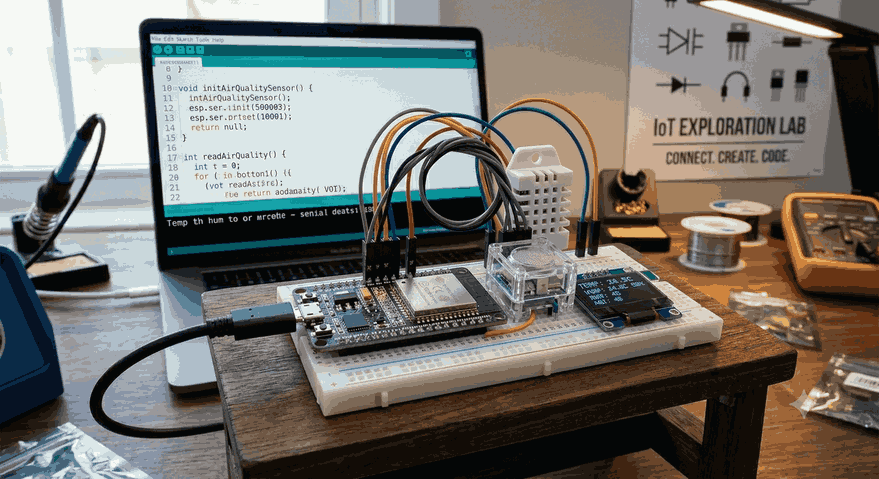
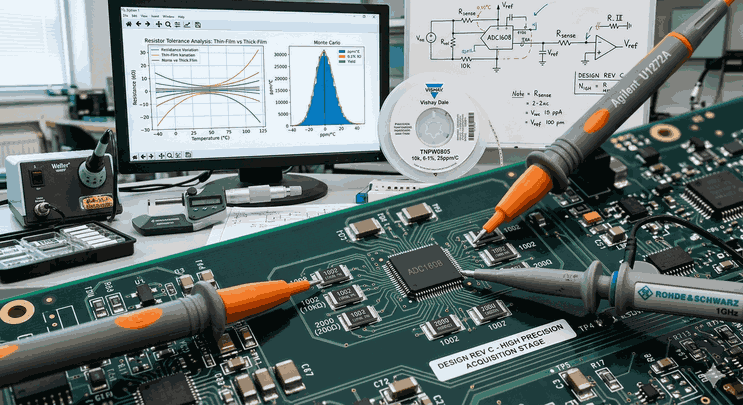
3. Osiloskop ve Mantık Analizörleri ile Sinyal Bütünlüğü Kontrolü
Yazılımın doğru çalışması, fiziksel katmandaki sinyallerin temiz olmasına bağlıdır. I2C hatlarındaki “pull-up” direnci eksikliği veya SPI saat frekansındaki gürültü, yazılımda anlamsız hatalara yol açar.
Logic Analyzer: Protokol bazlı hataları (örneğin bir sensörün ACK göndermemesi) yakalamak için kullanılır.
Osiloskop: Sinyal yükselme zamanlarını (rise time) ve voltaj dalgalanmalarını görmek için şarttır.
Kritik Not: Yazılım içinde belirli fonksiyonların giriş ve çıkışına “Toggle GPIO” komutları ekleyerek, fonksiyonun ne kadar sürdüğünü bir osiloskop yardımıyla mikro saniye hassasiyetinde ölçebilirsiniz. Bu, RTOS (Real-Time Operating System) kullanan sistemlerde jitter analizi için hayati önem taşır.
4. Bellek Hatalarının Teşhisi: HardFault ve Stack Analizi
Gömülü sistemlerde en sık karşılaşılan kilitlenme sebebi HardFault istisnalarıdır. Geçersiz bellek erişimi, hizada olmayan (unaligned) veri okuma veya sıfıra bölme gibi durumlar buna sebep olur.
HardFault Handler Yazımı
Default olarak gelen sonsuz döngü yerine, hata anındaki register değerlerini (R0-R12, LR, PC, PSR) dump eden bir yapı kurmak gerekir. Bu değerler, hatanın tam olarak hangi assembly komutunda gerçekleştiğini gösterir.
voidHardFault_Handler(void) {
__asmvolatile (
" tst lr, #4 \n"" ite ee \n"" m r0, msp \n"" m r0, psp \n"" ldr r1, [r0, #24] \n"" b prve_hardfault_args \n" );
}
voidprve_hardfault_args(unsignedint* args) {
// args[6] bize Program Counter (PC) değerini verir.
// Bu adresi .map dosyasında aratarak hatanın kaynağı bulunur.
while(1);
}
5. RTOS İzleme ve Kaynak Tüketimi Denetimi
Eğer projenizde FreeRTOS, Azure RTOS veya Zephyr gibi bir işletim sistemi kullanıyorsanız, hata ayıklama boyutu “Task” seviyesine çıkar.
Stack High Water Mark: Her taskın kullandığı maksimum stack miktarını izleyin. uxTaskGetStackHighWaterMark() fonksiyonu, stack’in taşmaya ne kadar yaklaştığını söyler.
Priority Inversion: Düşük öncelikli bir taskın, yüksek öncelikli bir taskı bloklaması durumudur. Mutex kullanımı sırasında “Priority Inheritance” özelliğinin aktif olduğundan emin olun.
6. Uzaktan Hata Ayıklama ve Gömülü Test Birimleri (Unit Testing)
Sistem sahaya çıktıktan sonra hata ayıklamak zordur. Bu yüzden Watchdog Timer (WDT) sadece sistemi resetlemek için değil, reset öncesi durum bilgisini kalıcı belleğe (EEPROM/Flash) kaydetmek için de kullanılmalıdır.
Yazılım Tabanlı Teknikler
Assert Kullanımı: Geliştirme aşamasında kritik parametreleri assert() ile kontrol edin.
Unit Test Frameworks: Unity veya CppUTest gibi kütüphaneleri kullanarak, donanımdan bağımsız mantık katmanlarını simülasyonda test edin.
// Basit bir assert mekanizması
#define ASSERT(expr) if(!(expr)) { \
log_error("Assertion Failed: " #expr ", file %s, line %d", __FILE__, __LINE__); \
disable_interrupts(); \
while(1); \
}
Sonuç ve Stratejik Yaklaşım
Gömülü sistemlerde debug süreci, sadece bir araç kullanımı değil, bir metodolojidir. Önce problemin deterministik (tekrarlanabilir) olup olmadığı belirlenmelidir. Ardından katmanlı bir yaklaşımla (Donanım -> Sinyal -> Protokol -> Yazılım Mimari) daraltma yapılmalıdır.
İyi bir gömülü yazılımcı, debug sembollerini (.elf dosyası içindeki DWARF formatı) ve bellek haritasını (.map dosyası) okumayı bilmelidir. Unutmayın ki en karmaşık hatalar genellikle “varsayımlar” üzerine kuruludur. Her zaman veriyi (register içeriği, osiloskop çıktısı) doğrulayın.
Sigrok/PulseView: Açık kaynaklı mantık analizörü yazılımı.
Unity Test: C dili için optimize edilmiş birim test kütüphanesi.
Bu derinlemesine teknikler uygulandığında, hata ayıklama süresi günlerden saatlere inebilir ve ürünün sahadaki güvenilirliği (MTBF - Mean Time Between Failures) maksimize edilebilir.