Size daha iyi hizmet sunabilmek için çerezleri kullanıyoruz.
Web sitemizde gezinme deneyiminizi geliştirmek, size kişiselleştirilmiş içerik ve hedefli reklamlar göstermek, web sitesi trafiğimizi analiz etmek ve ziyaretçilerimizin nereden geldiğini anlamak için çerezleri ve diğer izleme teknolojilerini kullanıyoruz.
⚠️
KVKK ve Çerez Politikası Bilgilendirmesi
6698 sayılı Kişisel Verilerin Korunması Kanunu (KVKK) ve Aydınlatma Yükümlülüğü kapsamında; web sitemizin temel fonksiyonlarının çalışabilmesi, veri güvenliğinin sağlanması ve performans analizi yapılabilmesi için zorunlu çerezlerin kullanımı gerekmektedir. Çerez kullanımını reddetmeniz halinde, teknik imkansızlıklar ve veri senkronizasyonu kesintileri nedeniyle web sitemizdeki hizmetlerden yararlanmanız mümkün olmamaktadır. Sitemizdeki içeriklere erişebilmek için çerez kullanımını onaylamanız gerekmektedir.
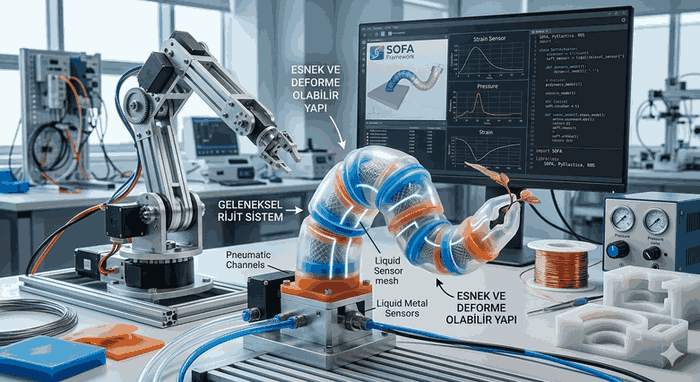
Yumuşak Robotik Sistemlerde Mühendislik Temelleri ve Esnek Yapıların Mekanik Analizi
Geleneksel robotik sistemler, on yıllardır yüksek hassasiyet ve hız sunan rijit bağlantı elemanları ve metalik gövdeler üzerine inşa edilmiştir. Ancak doğadaki canlı sistemlerin mekanik avantajları incelendiğinde, sert dokuların esnek ve deforme olabilir yapılarla birleşerek karmaşık ortamlara uyum sağladığı görülmektedir. Yumuşak Robotik (Soft Robotics), bu biyomimetik yaklaşımı mühendislik disiplinine entegre ederek, rijit gövdelerden elastomerik ve akıllı malzeme tabanlı yapılara geçişi temsil eder.
1. Yumuşak Robotiğin Kinematik ve Dinamik Temelleri
Rijit robotlarda serbestlik derecesi ($DOF$), eklem sayıları ile sınırlıyken; yumuşak robotlarda gövdenin her noktası teorik olarak sonsuz serbestlik derecesine ($infinite-DOF$) sahiptir. Bu durum, klasik Denavit-Hartenberg parametrelerinin ötesine geçilmesini zorunlu kılar.
Sürekli Eğrilik Kinematiği (Constant Curvature Kinematics)
Yumuşak bir kolun hareketini modellemek için genellikle Parçalı Sabit Eğrilik (PCC) modelleri kullanılır. Bu modelde kol, yay uzunluğu ($s$), eğrilik ($\kappa$) ve yönelim açısı ($\phi$) ile tanımlanan yay parçalarına bölünür.
Mekanik analizde malzemenin hiperelastik davranışı, Neo-Hookean veya Mooney-Rivlin modelleri kullanılarak simüle edilir. Strain enerjisi yoğunluk fonksiyonu ($W$), malzemenin büyük deformasyonlar altındaki tepkisini belirler:
$$W = C_1(I_1 - 3) + C_2(I_2 - 3)$$
Burada $I_1$ ve $I_2$, Cauchy-Green deformasyon tensörünün invaryantlarıdır.
2. Aktüasyon Mekanizmaları ve Akıllı Malzemeler
Yumuşak robotların “kas” sistemleri, geleneksel DC motorlardan farklı olarak çevresel uyaranlara tepki veren akıllı materyallerden oluşur.
Pnömatik ve Hidrolik Aktüatörler (PneuNets): Elastomerik kanalların basınçlı hava ile şişirilmesi prensibine dayanır. Basınç artışı, kanalın geometrisine bağlı olarak bükülme, uzama veya burulma yaratır.
Şekil Hafızalı Alaşımlar (SMA): Isıl değişimle faz değiştirerek (Martenzit - Ostenit) orijinal formuna dönen metalik alaşımlardır.
Dielektrik Elastomer Aktüatörler (DEA): İki elektrot arasındaki elastik filmin elektriksel alan etkisiyle sıkışması sonucu mekanik iş üretir.
3. Yazılım ve Kontrol Mimarisi
Yumuşak robotların kontrolü, malzemenin doğrusal olmayan ($nonlinear$) doğası nedeniyle oldukça karmaşıktır. Bu noktada Model Öngörülü Kontrol (MPC) ve Yapay Sinir Ağları (ANN) devreye girer.
Python ile Pnömatik Kontrol Simülasyonu
Aşağıdaki örnek, bir yumuşak robot aktüatörünün basınç değerine göre bükülme açısını tahmin eden basit bir regresyon modelini ve kontrol döngüsünü simüle etmektedir.
import numpy as np
import matplotlib.pyplot as plt
from scipy.optimize import minimize
classSoftActuator:
def__init__(self, stiffness, damping):
self.k = stiffness # Malzeme sertliği self.b = damping # Sönümleme katsayısı self.angle =0.0defdynamic_model(self, pressure, dt):
"""
Basit bir ikinci derece dinamik model:
I * alpha = Torque_p - k * theta - b * omega
""" target_angle = pressure *1.5# Basınç-Açı ilişkisi (lineer varsayım) angular_velocity = (target_angle - self.angle) * self.k - (self.b * self.angle)
self.angle += angular_velocity * dt
return self.angle
# Kontrol Döngüsüactuator = SoftActuator(stiffness=0.5, damping=0.1)
time_steps = np.linspace(0, 10, 100)
pressures = np.sin(time_steps) *10+15# Değişken basınç girdisiangles = []
for p in pressures:
current_angle = actuator.dynamic_model(p, dt=0.1)
angles.append(current_angle)
print("Simülasyon tamamlandı. Maksimum bükülme açısı:", max(angles))
4. Sensör Entegrasyonu ve Esnek Algılayıcılar
Yumuşak bir robotun “propriyosepsiyon” (özduyum) yeteneği kazanması için rijit sensörler kullanılamaz. Bunun yerine gövdeyle birlikte esneyebilen sensörler tercih edilir:
Likit Metal Sensörler (EGaIn): Mikro kanallara enjekte edilen ötektik galyum-indiyum alaşımları, gerilme sırasında direnç değişimi göstererek strain bilgisini iletir.
Fiber Optik Sensörler (FBG): Işığın kırılma indisindeki değişimleri ölçerek yüksek hassasiyetli bükülme verisi sağlar.
5. Yazılım Kaynakları ve Kütüphaneler
Yumuşak robotik araştırmalarında kullanılan temel yazılım ekosistemi şu şekildedir:
SOFA Framework (Soft Robotics Toolkit): Yumuşak gövdelerin gerçek zamanlı fizik simülasyonu için endüstri standardıdır. C++ tabanlıdır ve Python sarmalayıcıları mevcuttur.
PyElastica: Çubuk benzeri yumuşak yapıların (Cosserat Rod teorisi) simülasyonu için optimize edilmiş bir Python kütüphanesidir.
Abaqus/ANSYS: Sonlu Elemanlar Analizi (FEA) aşamasında malzemenin hiperelastik stres testleri için kullanılır.
ROS (Robot Operating System): Esnek robotların sensör füzyonu ve motor sürücüleri arasındaki haberleşme katmanını yönetir.
6. Mühendislik Tasarımında İmalat Teknikleri
Geleneksel talaşlı imalat, yumuşak robotik için uygun değildir. Bunun yerine Yumuşak Litografi ve Eklemeli Üretim teknikleri kullanılır.
Kalıplama ve Döküm (Soft Lithography)
3D yazıcı ile basılan rijit kalıplara silikon elastomerlerin (Örn: Ecoflex, Dragon Skin) dökülmesiyle karmaşık iç kanallara sahip robotlar üretilir. Bu aşamada malzemenin vizkozitesi ve kürleşme süresi, nihai ürünün Young Modülü üzerinde doğrudan etkilidir.
Doğrudan Mürekkep Yazma (DIW)
Fonksiyonel mürekkeplerin (iletken polimerler, hidrojeller) doğrudan ekstrüde edilmesiyle sensör ve aktüatörün tek bir parçada toplandığı monolitik yapılar oluşturulur.
7. Gelecek Vizyonu ve Hibrit Sistemler
Tamamen yumuşak robotların taşıma kapasitesi (payload) ve hassasiyet problemleri, mühendisleri Rijit-Yumuşak Hibrit sistemlere yöneltmektedir. Bu yapılar, iskelet sistemine sahip canlılar gibi, yükü taşıyan rijit bir iç yapı ile çevreye uyum sağlayan yumuşak bir dış kaplamadan oluşur.
Teknik Notlar:
Histerezis Problemi: Yumuşak malzemeler, yük kaldırıldığında hemen eski hallerine dönmeyebilir. Bu gecikme (hysteresis), kontrol algoritmalarında telafi edilmelidir.
Propriyosepsiyon: Yumuşak robotun kendi şeklini gerçek zamanlı olarak kestirebilmesi için “Deep Learning” tabanlı veri odaklı modeller, analitik modellerden daha başarılı sonuçlar vermektedir.
Sonuç
Yumuşak robotik, mekanik tasarımın sınırlarını zorlayan disiplinlerarası bir alandır. Malzeme bilimi, akışkanlar mekaniği ve ileri düzey kontrol teorisinin kesişim noktasında yer alan bu teknoloji; cerrahiden arama-kurtarma çalışmalarına kadar geniş bir yelpazede robotik paradigmasını değiştirmektedir. Geleceğin sistemleri, sadece komutları yerine getiren makineler değil, fiziksel çevreyle “mekanik bir zeka” (embodied intelligence) içinde etkileşime giren uyumlu yapılar olacaktır.