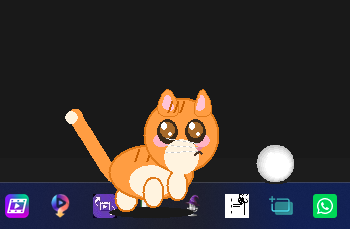
Masaüstünde Bir Davetsiz Misafir: Python ile Sanal Kedi ve Fare Takip Uygulaması
Tkinter ve pyautogui ile hayata geçirilen bu zarif simülasyon, fare imlecinizin peşinden koşan 3B efektli bir topu ve onu yumuşak animasyonlarla kovalayan sevimli, Chibi tarzı bir kediyi masaüstünüze konuk eder. v2.0.0.0 ile artık tüm monitörlerinizde çalışıyor ve dilinizi Türkçe olarak karşılıyor. Uzun süre hareketsiz kaldığında estetik konuşma balonlarıyla size fısıldayan bu sevimli dost, arkasındaki pencerelere dokunmanızı engellemeyen tıklama geçirgenliği ve asenkron mırlama sesiyle dijital çalışma alanınıza sıcak bir neşe katar.
blog
python
tkinter
simulasyon
acik-kaynak
eglence
coklu-dil
cat
catlovers
kedi
kediseverler