Size daha iyi hizmet sunabilmek için çerezleri kullanıyoruz.
Web sitemizde gezinme deneyiminizi geliştirmek, size kişiselleştirilmiş içerik ve hedefli reklamlar göstermek, web sitesi trafiğimizi analiz etmek ve ziyaretçilerimizin nereden geldiğini anlamak için çerezleri ve diğer izleme teknolojilerini kullanıyoruz.
⚠️
KVKK ve Çerez Politikası Bilgilendirmesi
6698 sayılı Kişisel Verilerin Korunması Kanunu (KVKK) ve Aydınlatma Yükümlülüğü kapsamında; web sitemizin temel fonksiyonlarının çalışabilmesi, veri güvenliğinin sağlanması ve performans analizi yapılabilmesi için zorunlu çerezlerin kullanımı gerekmektedir. Çerez kullanımını reddetmeniz halinde, teknik imkansızlıklar ve veri senkronizasyonu kesintileri nedeniyle web sitemizdeki hizmetlerden yararlanmanız mümkün olmamaktadır. Sitemizdeki içeriklere erişebilmek için çerez kullanımını onaylamanız gerekmektedir.
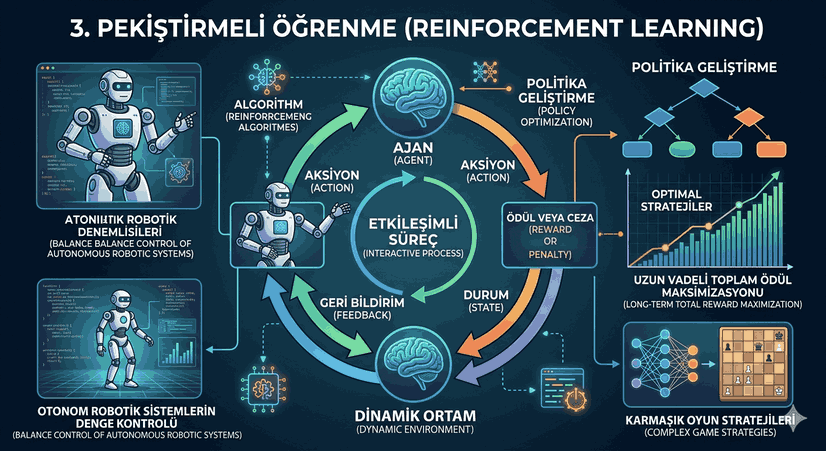
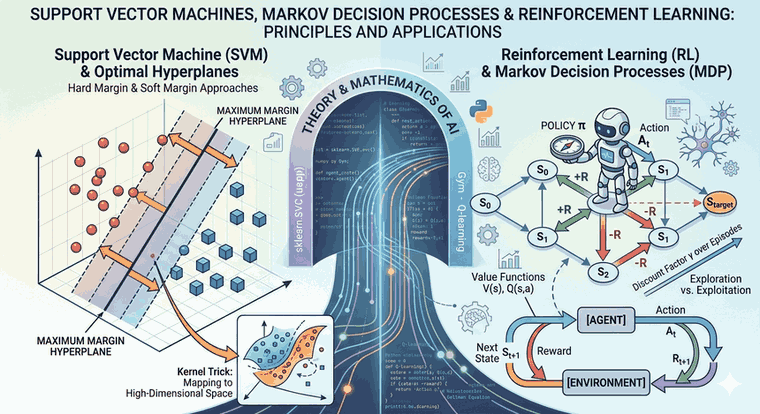
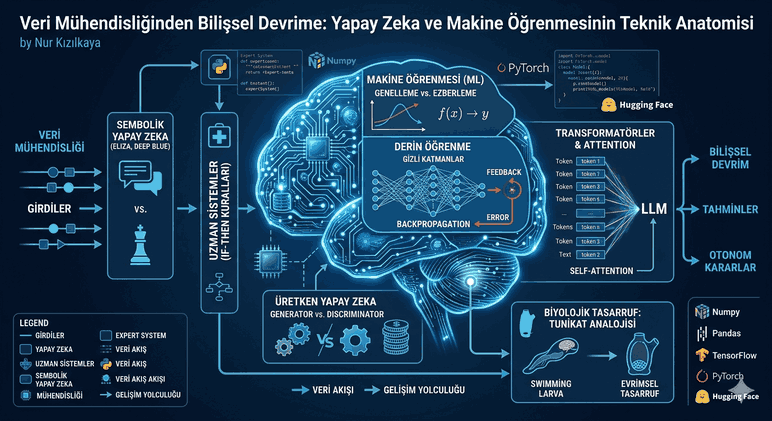
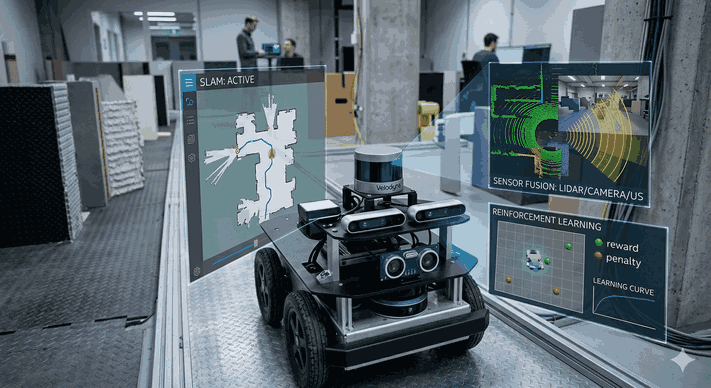
Pekiştirmeli Öğrenme: Dinamik Karar Mekanizmaları ve Otonom Sistemlerin Matematiği
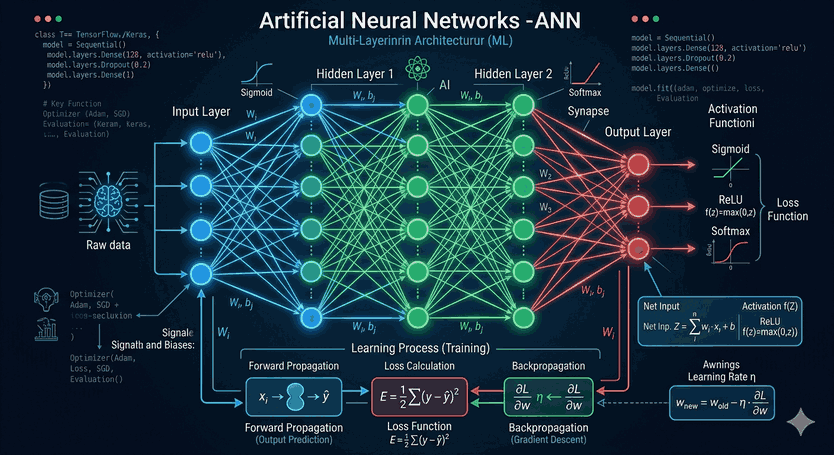
Pekiştirmeli Öğrenme (Reinforcement Learning - RL), makine öğrenmesi hiyerarşisinde denetimli ve denetimsiz öğrenmeden keskin hatlarla ayrılan, temelini davranışsal psikolojideki “deneme-yanılma” mekanizmasından alan bir disiplindir. RL, statik veri kümeleri üzerinde örüntü tanımaktan ziyade, bir ajanın (agent) belirsizlik içeren bir ortamda (environment) kümülatif ödülü maksimize etmek amacıyla gerçekleştirdiği aksiyonlar dizisini optimize eder.
Şekil 1: Pekiştirmeli Öğrenme: Dinamik Karar Mekanizmaları ve Otonom Sistemlerin Matematiği.
RL Temelleri ve Markov Karar Süreçleri (MDP)
Pekiştirmeli öğrenmenin matematiksel iskeletini Markov Karar Süreçleri (Markov Decision Processes - MDP) oluşturur. Bir RL problemi genellikle beşli bir set $(S, A, P, R, \gamma)$ ile tanımlanır:
S (State Space): Ajanın içinde bulunduğu tüm olası durumların kümesi.
A (Action Space): Ajanın bir durumda gerçekleştirebileceği tüm eylemler.
P (Transition Probability): Bir $s$ durumunda $a$ aksiyonu alındığında $s'$ durumuna geçme olasılığı $P(s' | s, a)$.
R (Reward Function): Geçiş sonrası elde edilen anlık geri bildirim $R(s, a, s')$.
Ajanın temel amacı, her durum için hangi aksiyonun en iyi olduğunu söyleyen bir Politika ($\pi$) geliştirmektir. Bu süreçte Değer Fonksiyonları ($V$) ve Aksiyon-Değer Fonksiyonları ($Q$), ajanın uzun vadeli başarısını tahmin etmek için kullanılır.
Politika Optimizasyonu ve Gradyan Yöntemleri
RL dünyasında çözümler genellikle iki ana kola ayrılır: Değer Temelli (Value-based) ve Politika Temelli (Policy-based) yöntemler. Politika optimizasyonu, ajanın davranışını doğrudan bir parametre kümesi ($\theta$) üzerinden modellemeyi hedefler.
Buradaki temel mantık, beklenen toplam ödülü $J(\theta)$ maksimize edecek $\theta$ değerlerini bulmaktır. Policy Gradient algoritmaları, bu fonksiyonun gradyanını hesaplayarak parametreleri günceller:
Bu yaklaşım, sürekli aksiyon uzaylarında (örneğin bir robot kolunun hassas açısı) geleneksel Q-Learning yöntemlerine göre çok daha stabil sonuçlar verir.
Derin Pekiştirmeli Öğrenme (Deep RL) ve Mimari Yapılar
Geleneksel RL yöntemleri, durum uzayı büyüdüğünde “boyutun laneti” (curse of dimensionality) ile karşılaşır. Modern sistemlerde bu durum, fonksiyon yaklaştırıcı olarak Evrişimli Sinir Ağları (CNN) veya Yinelemeli Sinir Ağları (RNN) kullanılarak aşılır.
Deep Q-Networks (DQN)
DQN, klasik Q-Learning algoritmasını derin sinir ağları ile birleştirir. Eğitim stabilitesini sağlamak için iki kritik teknik kullanır:
Experience Replay: Ajanın geçmiş deneyimlerini bir bellek havuzunda saklayıp rastgele örnekleyerek eğitim yapması.
Target Network: Hedef Q değerlerini hesaplamak için kullanılan ağın belirli aralıklarla güncellenmesi.
Aktör-Kritik (Actor-Critic) Modelleri
Bu hibrit mimaride iki farklı yapı mevcuttur:
Aktör: Politikayı günceller (hangi aksiyonun alınacağına karar verir).
Kritik: Alınan aksiyonun değerini tahmin eder (eylemi değerlendirir).
PPO (Proximal Policy Optimization) ve SAC (Soft Actor-Critic) gibi modern algoritmalar, bu yapıyı kullanarak otonom sürüş ve robotik denge kontrolünde standart haline gelmiştir.
Yazılım Ekosistemi ve Uygulama Kütüphaneleri
RL projelerinin geliştirilmesinde endüstri standardı haline gelmiş kütüphaneler şunlardır:
OpenAI Gymnasium: Ortam arayüzleri için standart API.
Ray Rllib: Ölçeklenebilir, dağıtık RL eğitimleri için üretim seviyesi araçlar.
PyBullet / MuJoCo: Fizik tabanlı simülasyon motorları.
Teknik Uygulama: Temel Bir Q-Learning Algoritması (Python)
Aşağıda, bir ajanın basit bir ortamda (GridWorld) optimal rotayı bulmasını sağlayan Q-Learning mekanizmasının ham Python implementasyonu yer almaktadır:
Pekiştirmeli öğrenme, klasik kontrol teorisinin (PID veya LQR gibi) yetersiz kaldığı yüksek serbestlik dereceli (DoF) sistemlerde kritik rol oynar.
Ters Sarkaç (Inverted Pendulum): RL ajanı, sürekli veri akışıyla tork değerlerini ayarlayarak sistemi dengede tutmayı öğrenir.
Bipedal Yürüyüş: Robotun eklem açıları, zemin sürtünmesi ve ağırlık merkezi arasındaki ilişki, milyonlarca simülasyon adımı (massively parallel simulation) ile optimize edilir.
Önemli Not: RL modellerinin gerçek fiziksel donanımlara aktarılmasında “Sim-to-Real” problemi en büyük engeldir. Simülasyondaki kusursuz fizik ile gerçek dünyadaki sensör gürültüsü arasındaki farkı kapatmak için Domain Randomization teknikleri kullanılır.
İleri Düzey Kavramlar: Exploration vs. Exploitation Dilemması
RL’in en büyük zorluklarından biri, ajanın bildiği en iyi yolu mu izleyeceği (Exploitation) yoksa daha iyi bir yol bulma umuduyla yeni şeyler mi deneyeceği (Exploration) arasındaki dengedir.
Upper Confidence Bound (UCB): Belirsizliği ödül fonksiyonuna dahil ederek ajanı daha az ziyaret edilen durumlara teşvik eder.
Entropy Regularization: Politikanın çok erken bir noktada tek bir aksiyona çökmesini engellemek için maliyet fonksiyonuna entropi terimi eklenir.
Veri Akışının Dinamik Doğası
Statik derin öğrenmede veri seti sabittir ve eğitim bu veri üzerinde iterasyonlar yapar. RL’de ise Veri Ajanın Kendi Politikasından Üretilir. Eğer ajan kötü bir politika izliyorsa, topladığı veriler de kalitesiz olacaktır. Bu “pozitif geri besleme döngüsü”, RL sistemlerinin eğitimini oldukça hassas ve bazen de kararsız hale getirir. Bu yüzden hiperparametre optimizasyonu (Öğrenme hızı, iskontolama faktörü, batch boyutu) RL projelerinde başarının anahtarıdır.
Sonuç ve Gelecek Projeksiyonu
Pekiştirmeli öğrenme, yapay zekayı sadece bir “tahmin aracı” olmaktan çıkarıp “karar verici” bir aktöre dönüştürmektedir. Bugün oyun stratejilerinde (AlphaGo, Dota 2 OpenAI Five) gördüğümüz bu başarılar; yarın enerji şebekelerinin yönetimi, yüksek frekanslı finansal işlemler ve otonom cerrahi robotların temelini oluşturacaktır. Teknik derinlik arttıkça, algoritmaların örneklem verimliliği (sample efficiency) ve güvenli öğrenme (safe RL) konuları araştırma odak noktası olmaya devam edecektir.